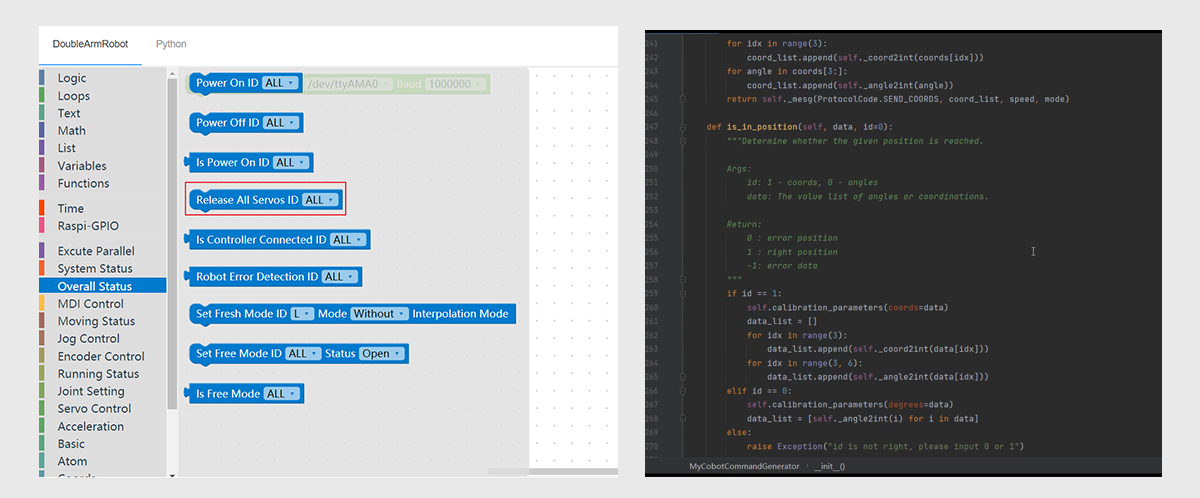
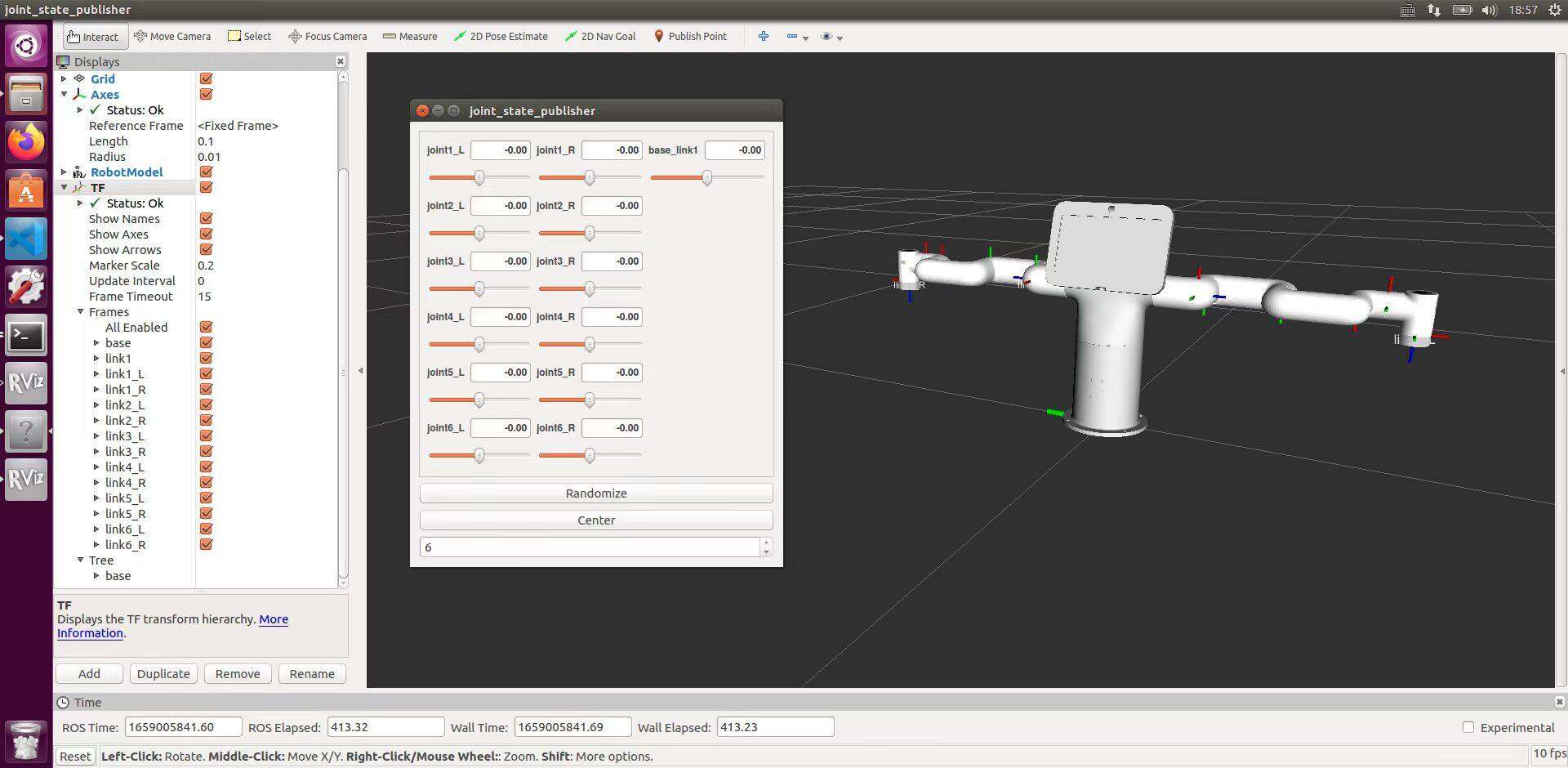
Open bottom control interface. The potential value, angles, coordinates, running speeds and other interfaces can be controlled freely. It can achieve the application research of dual-arm robots, motion path planning, development of action and visual recognition. A variety of interfaces can meet the multiple applications for the comercial use and educational purpose.