M5 version robotic arms is jointly produced by Elephant Robotics and Shenzhen Mingzhan
Technology Co., Ltd. - M5STACK. It is the first robotic arm of myCobot series made for sale. It
adopts Esp32 as its core processor, and applies two screens and several physical buttons
so that it can be used on a table-sized ground. Deeply integrated with M5 expensive
ecosystem, users are able to control robots via UIFlow, Python, Arduino in accordance with
tutorial provided on our official website.
M5 version robotic arms is equipped with two screens and several physical buttons,
M5Stack-basic works as the main control on pedestal , and M5STACK Atom works as the
secondary control on the end.
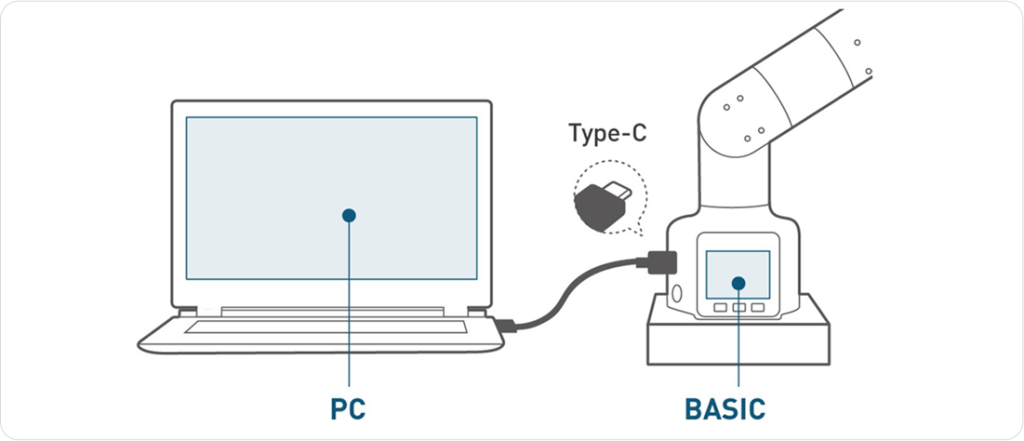
M5 version robotic arms itself only has the ** recording and playback ** function, that is,
recording action and playing action,If you need to use UIFlow, python, Arduino for further
development, you need to connect to PC or laptop. The connection methods are as follows:
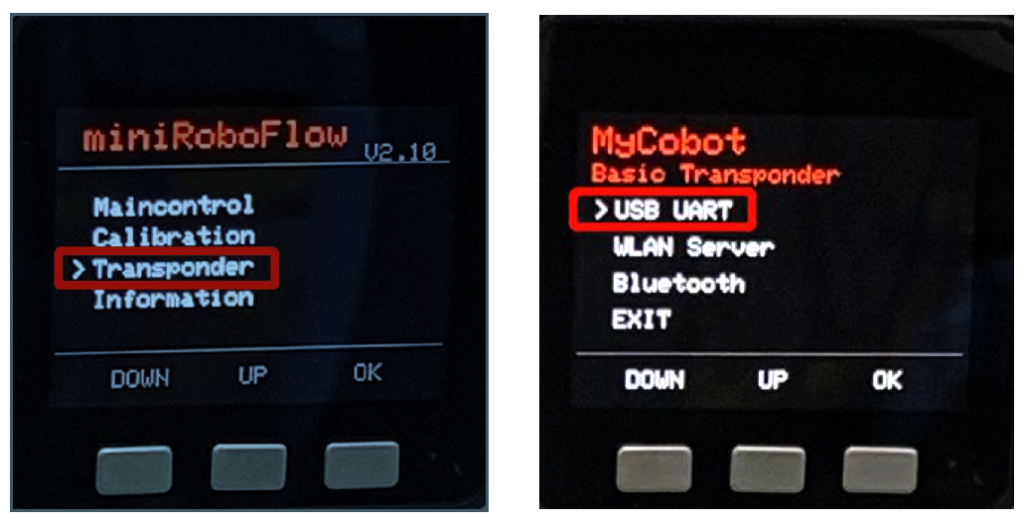
After the connection is complete, turn on the manipulator communication according to the
following steNote:
The appropriate development methods are:myBlockly, Python, C++, C#, Arduino, JavaScript, ROS,how to program the operation, please click the corresponding link above.
PI
PI version robotic arms is a joint product developed by Elephant Robotics and Raspberry Pi.
Adopting the Raspberry PI 4B as its core processor, and reserving the origin hardware
interface of RaspBerry PI 4B, the robotic arm meets the application needs of Linux system
with one-in-all structure for portable robot development. Featuring built-in Ubuntu 18.04.
system as well as development environments like Python, ROS and myBlockly, it can be
developed after connecting with displayer without matching with PC.
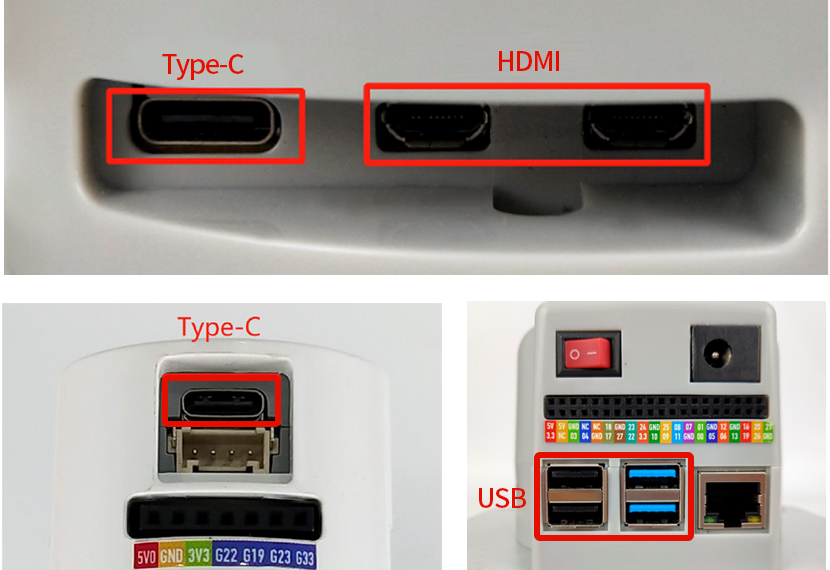
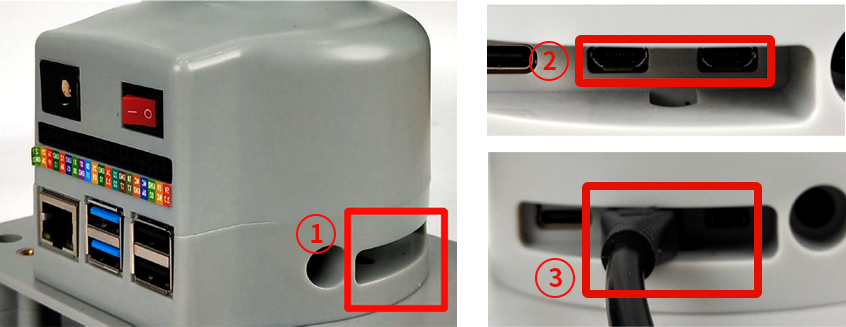
PI version robotic arms is embedded with Raspberry PI 4B, 1.5GHz 4-core microprocessor,
runs Debian/Ubuntu platform, supports 4 USB channels, 2 HDMI channels, standardized
GPIO interface, TF card is removable
The essence of the PI version robotic arms is a development board with an independent
system, which can be seen as a miniature computer host.
The communication between the
host and the host cannot be simply constituted by a wire. It can only be connected to an
independent monitor, and equipped with power supply, mouse and keyboard, and can be
developed and operated after entering the built-in system of the development board
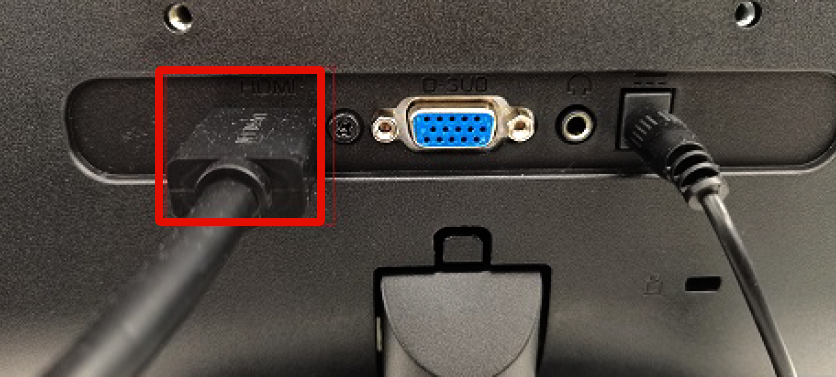
Plug the HDMI cable into the HDMI port of the monitor.
Plug the other end into the HDMI port of the robotic arm.
The appropriate development methods are:myBlockly, Python, C++, C#, ROS,how to program the operation, please click the corresponding link above.