| Name |
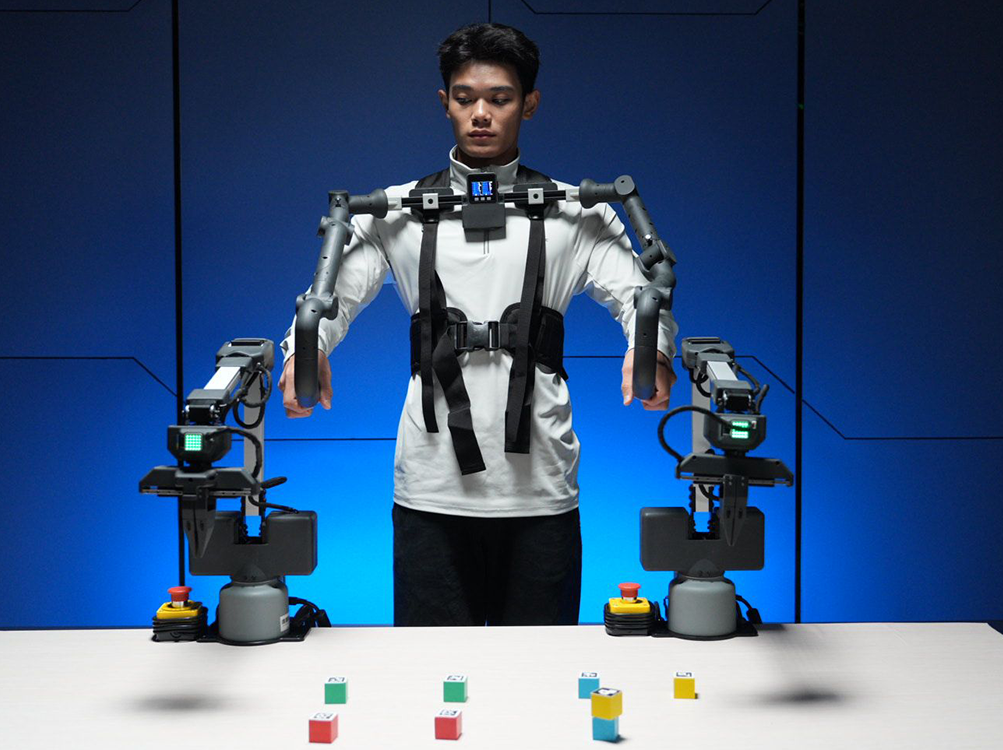
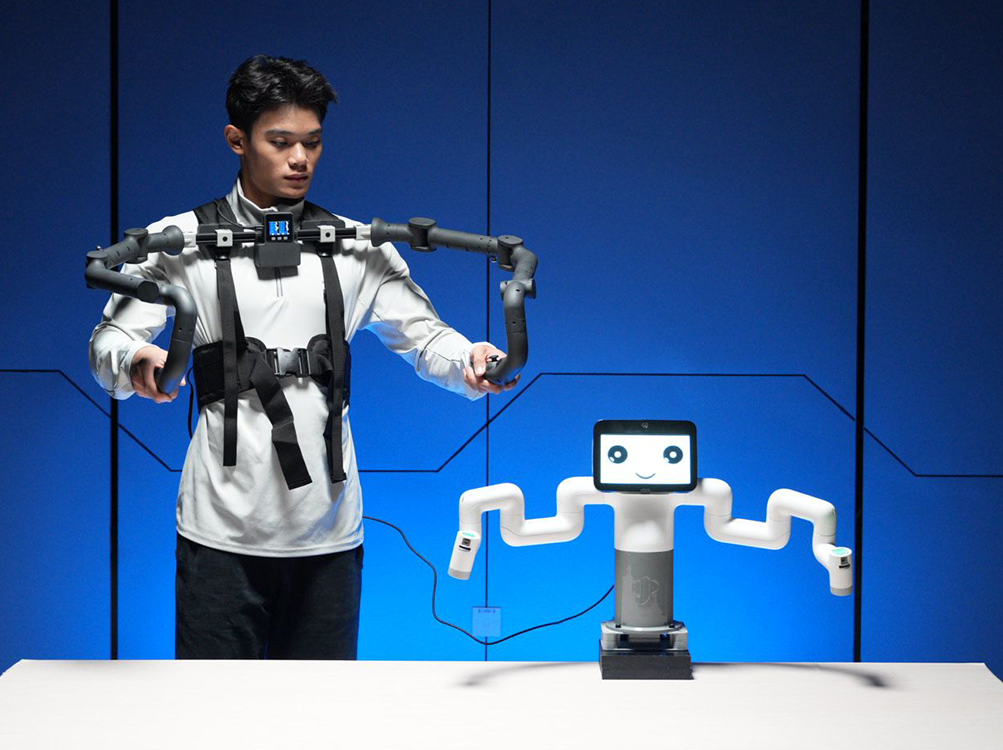
myController S570 – Exoskeleton Controller |
| DOF |
12 (6+6) |
| Arm Reach |
570mm per arm |
| Total Span |
1500mm |
| Weight |
1.5kg |
| Power Supply |
8.4V, 2A |
| Rotation Range |
±180° |
| End Actuator |
Dual-finger grip with two buttons and a joystick |
| USB Connection |
Type-C |
| LCD Display |
2.0″ @ 320×240, IPS panel, 853 nits max brightness |
| Data Rate |
Up to 100Hz |
| Main Controller |
ESP32 (Basic), 240MHz dual-core, 600 DMIPS, 520KB SRAM, dual-mode Bluetooth and Wi-Fi |
| Auxiliary Controller |
ESP32 ×2 (Atom), 4MB Flash, 5×5 LED Matrix |
| Interfaces |
Provides access to joint position, speed, acceleration, button status, joystick state, gyroscope data, and customizable LED colors (read/write). |
| File Formats |
Supports 3D-Step and 2D CAD files |
| Current Position |
Read |
| Current Speed |
Read |
| Current Acceleration |
Read |
| Button Status |
Read |
| Joystick State |
Read |
| Gyroscope Data |
Read |
| LED Light Color |
Read/Write |