Powered by Raspberry Pi 4B, paired with Elephant Robotics' customized Ubuntu Mate 20.04 OS, myArm 300 Pi offers a PC-like experience. No need for an external PC control; connect a monitor, keyboard, and mouse for easy use. Ideal for robotics education, control logic teaching, robot applications, and ROS simulation classes. A perfect assistant for 7-axis robotic arm learning and application.
Educational Research
myArm offers 7 degrees of freedom, surpassing 6-DOF robots, allowing movements as flexible as a human arm. With built-in interfaces, it supports advanced elbow joint posture changes. Ideal for practical teaching in robot posture research, motion path planning, redundancy management, kinematics, ROS development, robot application development, programming, and data processing.
Creative Development
myArm robot is designed to be 100% compatible with myCobot accessories, ensuring perfect adaptability in structure installation and software control. It expands the application scenarios of the myArm robot. With almost 100% open hardware interfaces for Raspberry Pi 4B and M5Atom, users can pair it with personal Raspberry Pi 4B and M5Atom accessories for customized development.
Business Exploration
myArm robotic arm supports integration with other upper-level machines, including PCs, industrial control terminals, and mobile AGV chassis, suitable for various application scenarios. It supports multiple connection control methods, both wired and wireless, meeting the needs of complex projects. Paired with different terminals, myArm can be used in various scenarios like robot application model displays, educational teaching kit displays, industrial 4.0 application displays, and composite robot application displays.
Parameters
Working Radius
300mm
Degree of freedom
7DOF
Raspberry Pi
Camera Support
APP Control
Drag&Teach
Gamepad control
ROS1
ROS2
MYBLOCKLY
GPIO
ROS
Practical Teaching
Python
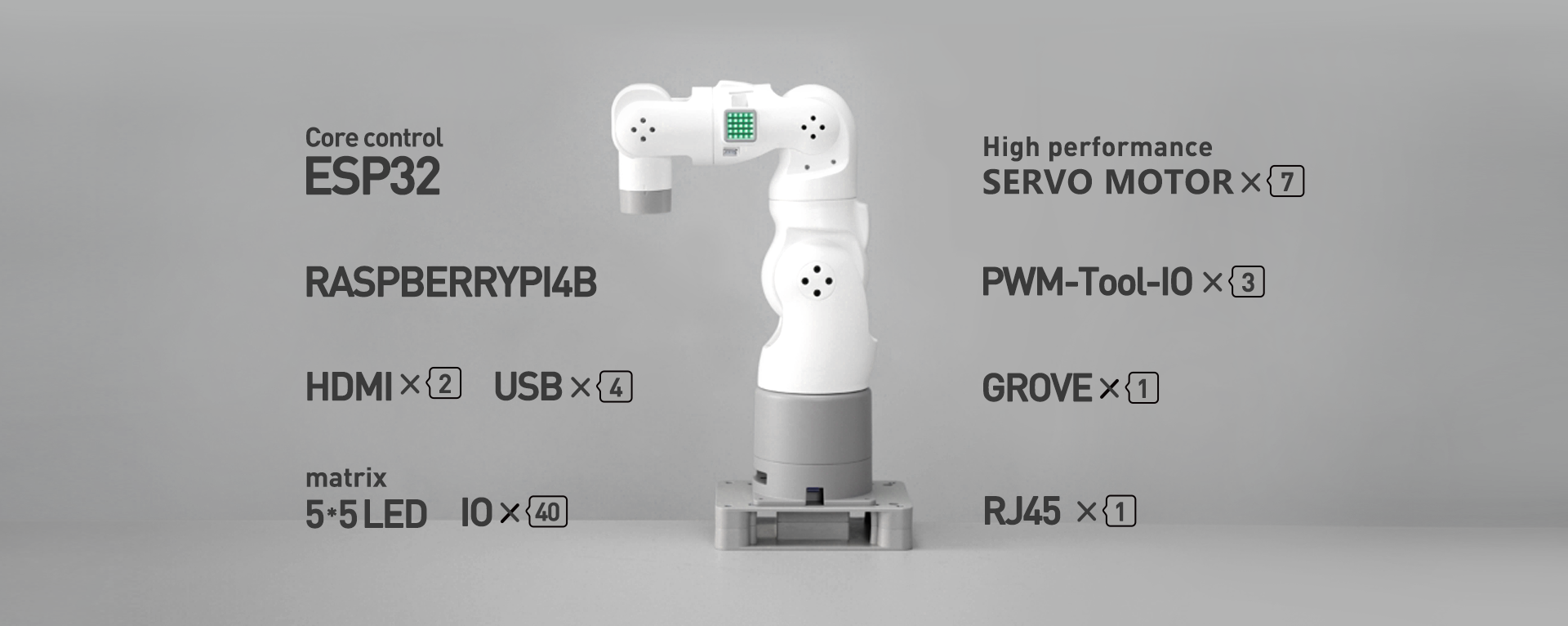
Advanced Configuration
Robust product configuration meets your embedded development needs: button interaction, screen display, buzzer, IO interface. Everything you think of can be developed.
Custom Robot OS
System developed over three years, it offers a near-desktop PC experience. The myArm system not only has built-in environments like ROS1/2 and Python but also features robot development software like VSCode, VNC, and SSH. No complicated configurations needed. It also offers automated update software, supporting one-click updates for the corresponding development environment. Simplifying the process makes robot applications easier.
CPU: 64-bit 1.5GHz 4Core (28nm)
GPU:Broadcom VideoCore vl@50OM
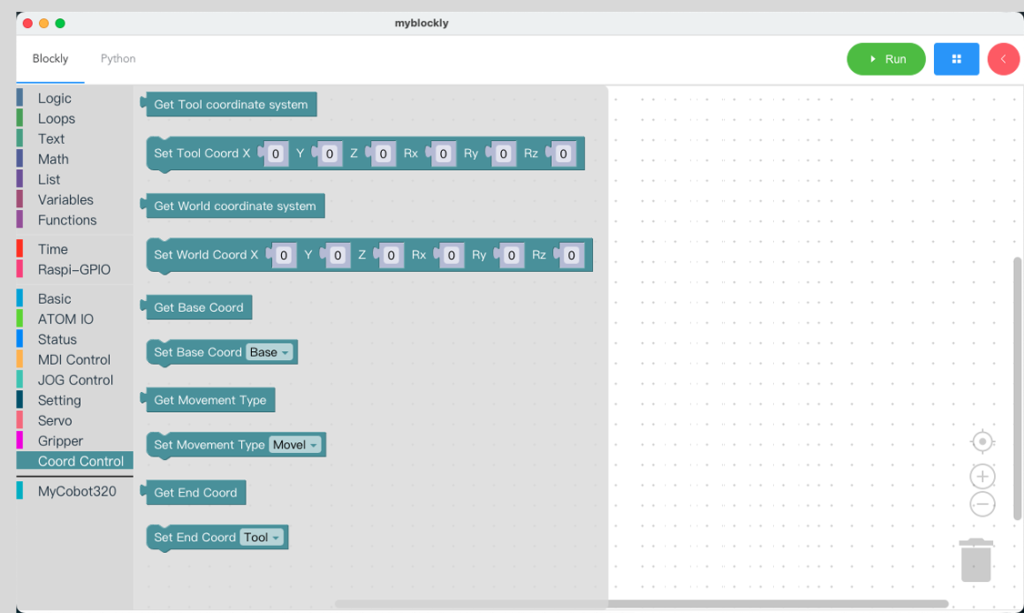
Easy Robot Programming
Offers myBlockly, a drag-and-drop programming software for beginners. With block-based programming and graphical debugging tools, even novices can easily control the robotic arm. Python 2/3 development environment supports various development driver libraries like OpenCV, QT, and pymycobot. It meets advanced development needs in robot control, image recognition, and frontend development.
myBlockly
Python
ROS Simulation Support
Offers multi-version support for ROS1 and ROS2. With consistent extension support across versions, it provides RVIZ and MOVEIT demo cases under different versions, meeting users' in-depth development needs.
myAGV + myArm Combo
Mobile chassis + robotic arm development combo. Start collaborative robot projects at a low cost, including SLAM mapping, autonomous navigation, ROS development environment, 7-axis collaborative robot control, visual recognition, and inter-device communication.
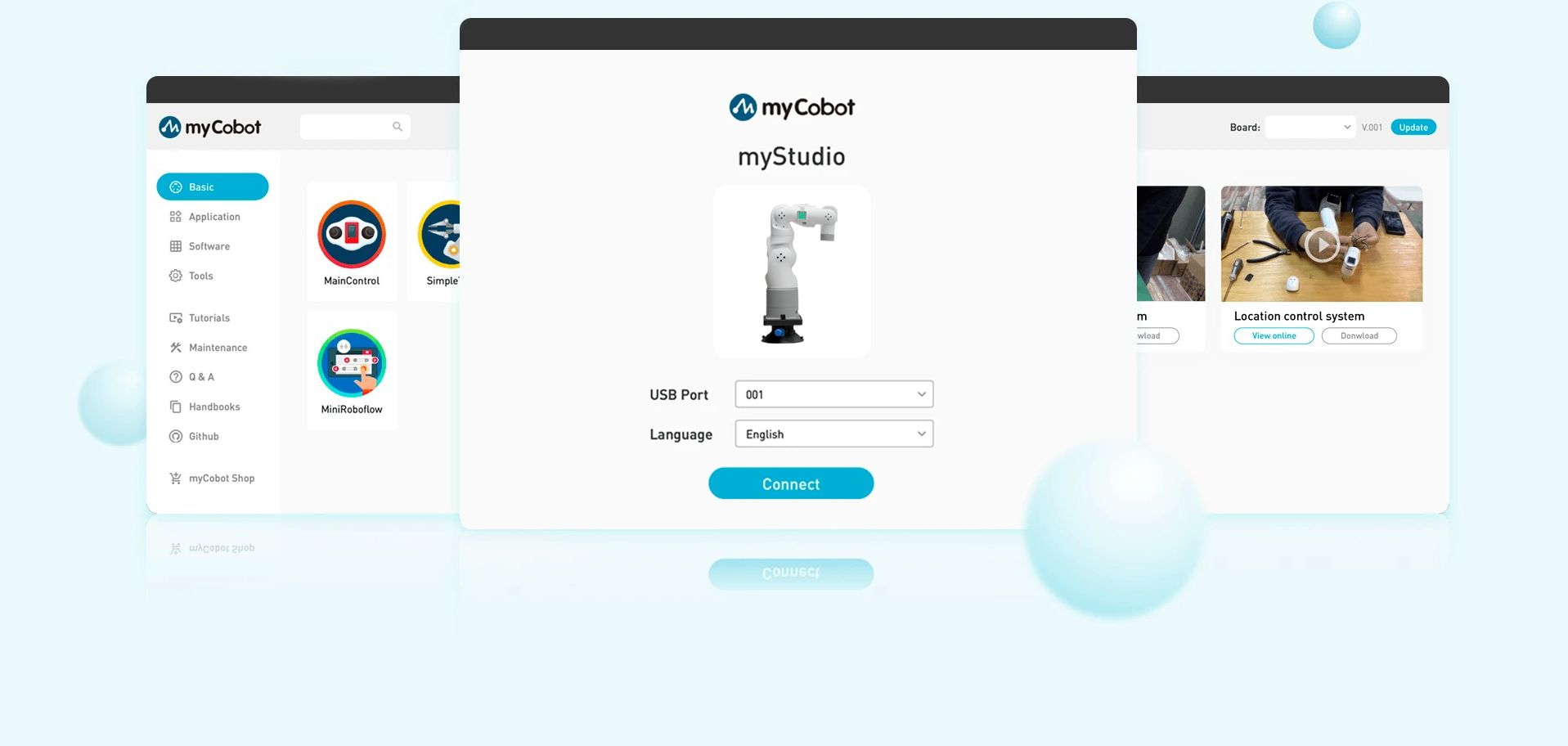
myStudio
A one-stop robotic application platform
myStudio provides various functions and tutorials for users, such as installation of robotic driver, robotic firmware updating, user mannul, video tutorials, etc.