myAGV is jointly developed by Elephant Robot and Huaway and produced independently. The manipulator uses mycobot and loads camera Eye-in-Hand design. myAGV adopts Mecanum wheel + lidar + high-precision camera. Control mode: autonomous navigation, handle control, keyboard control, etc.
APPLICATIONS
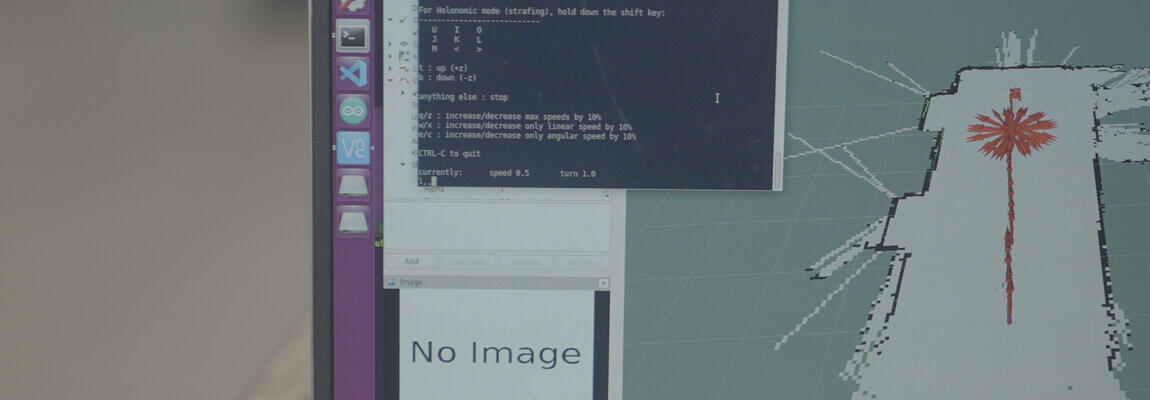
Sketch and navigation of slam lidar
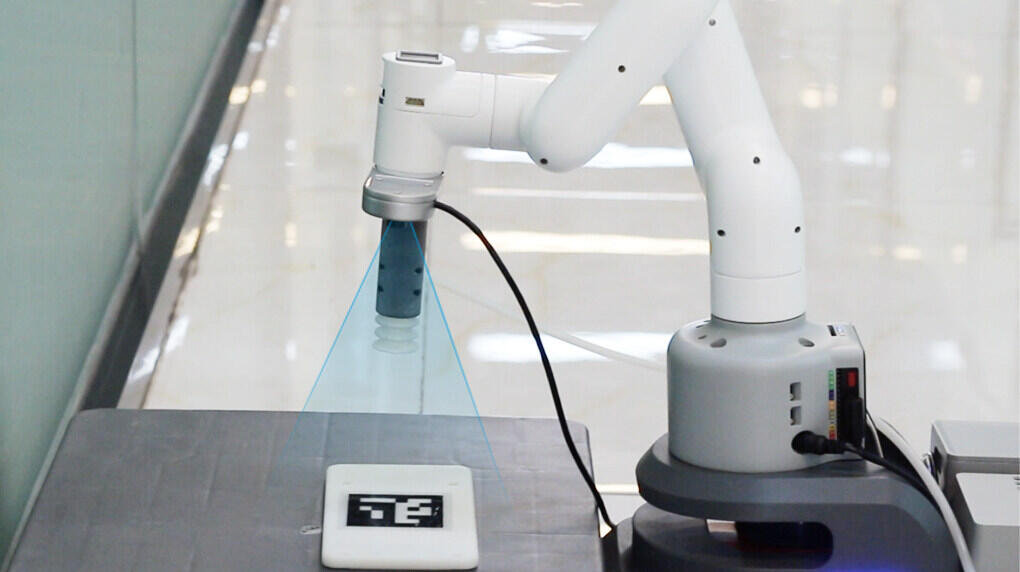
Eye-in-hand recognition and grasping, using different end effectors
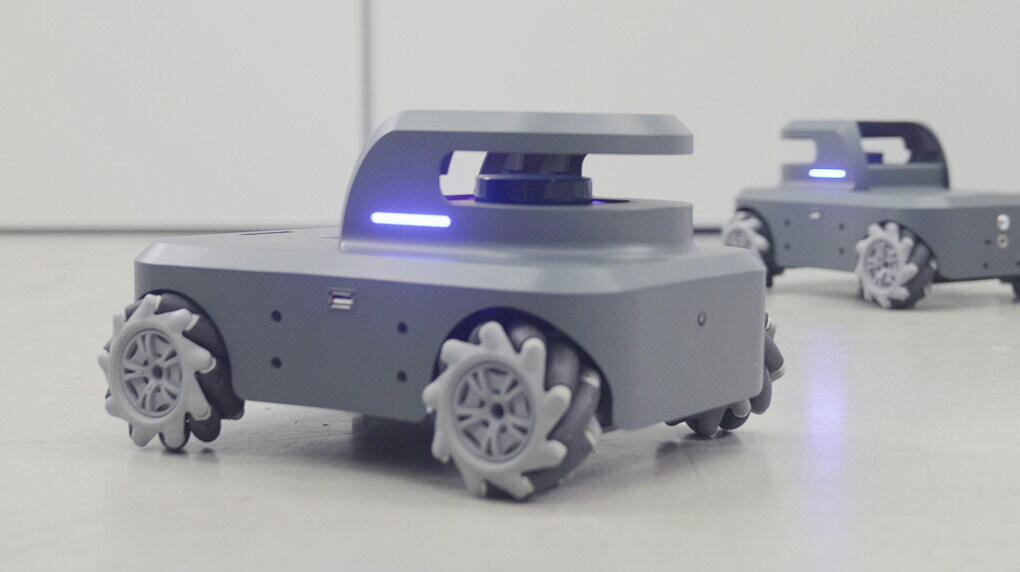
Multiple AGVs concurrent operation
6-DOF compound robot
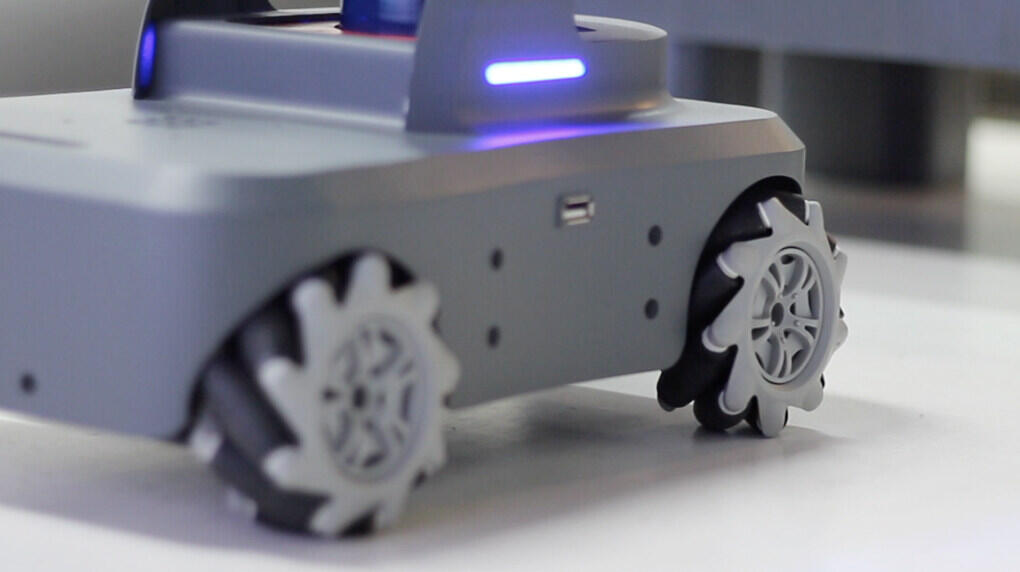
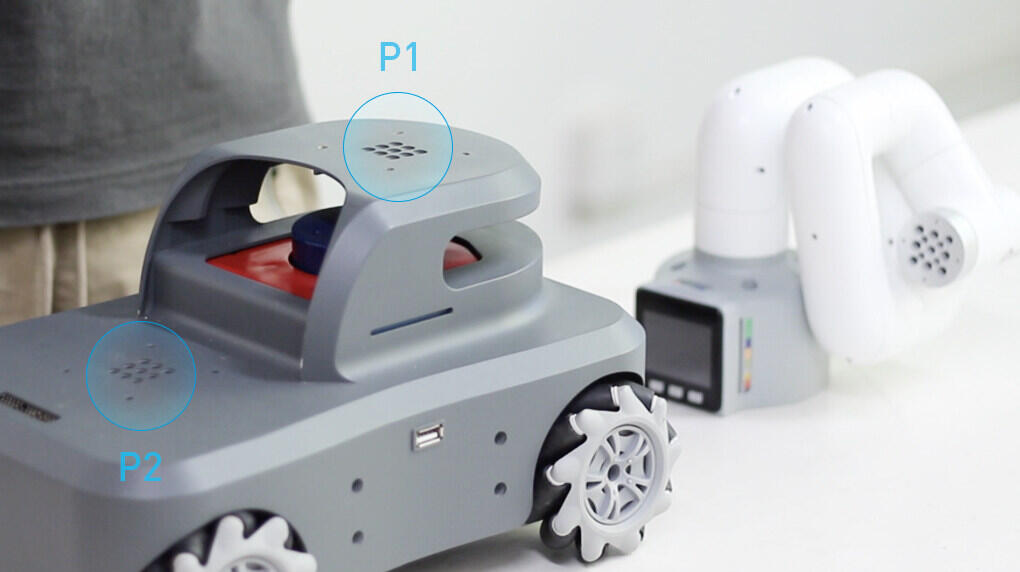
Omnidirectional wheel trolley
Four mecanum wheels, full package design
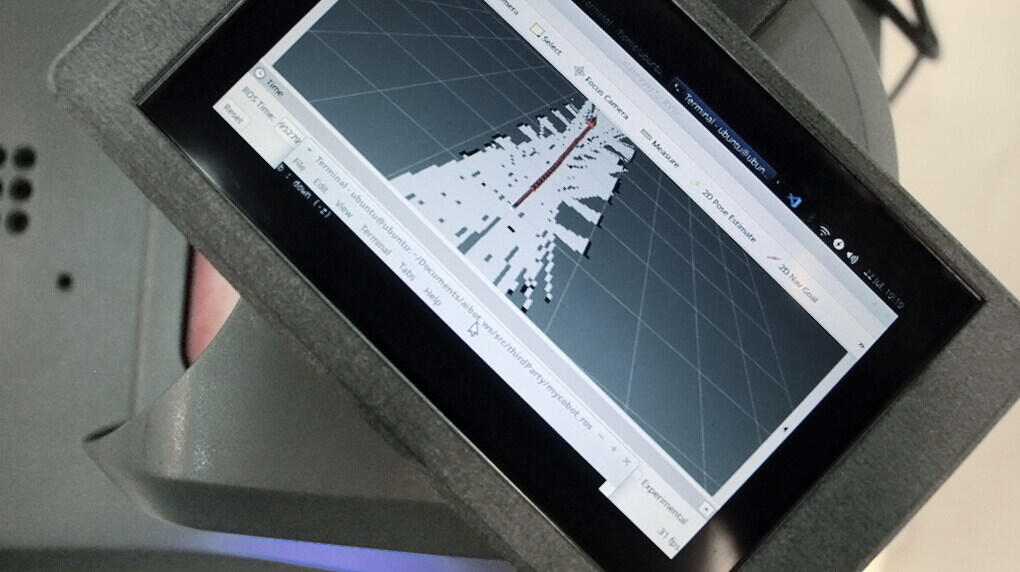
Slam lidar navigation and mapping
Real time movement and mapping; Autonomous navigation
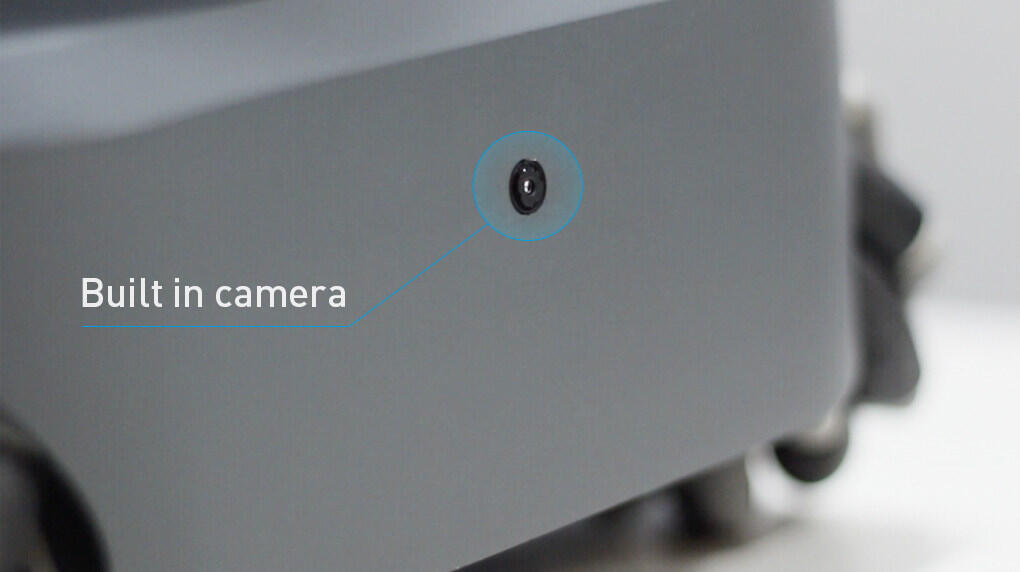
Built-in camera
It can identify and accurately locate objects
Smallest compound robot
It can carry up to 2 mycobot robot arm and equipped with end-effectors
Eye-in-Hand recognition
myCobot can accurately locate and calibrate the camera and capture it in a large range
Various playing methods
multiple machines can cooperate, multiple control modes, and multiple robots move in real time
Various ways of programming
Support ROS simulation and moveit all open source; At the same time, there are rich interfaces: Raspberry pi, Arduino, python, C + +