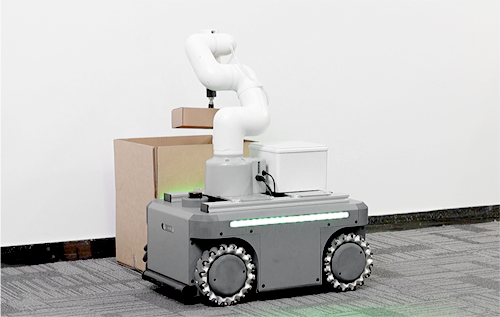
| Parameter | Details |
| Product Dimensions | 530*360*245 mm |
| Weight | 40KG |
| Maximum Payload | 50KG |
| Drive Mode | Omnidirectional steering system |
| Communication Interface | RS232 |
| Speed (Full Load Test) | 1.5m/s |
| Minimum Turning Radius | 0m (In-place rotation) |
| Maximum Incline Angle | 10° |
| Battery | 24V 20AH Lithium Iron Phosphate |
| Operating Time(No-load 1m/s) | 5-6hours |
| Charging Time | 5-6hours |
| Suspension Type | Swing-arm independent suspension |
| Suitable Environment | Indoor |
| Protection Rating | IP22 |
| Operating Temperature | -10-40℃ |
| External Interfaces | DC4017 charging port
XT60 24V5A power supply port *1
XT30 12V5A power supply port *1
USB-C serial port *1
Ethernet port *1
HDMI *1
INPUT IO *6
OUTPUT *6
USB3.0 *2 |