| Name |
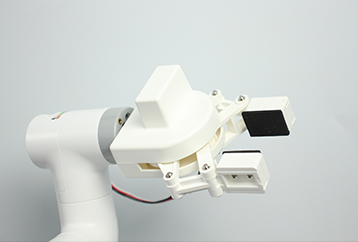
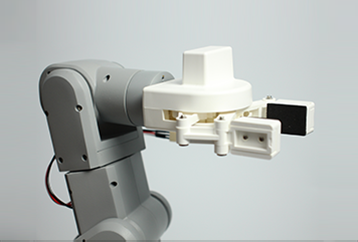
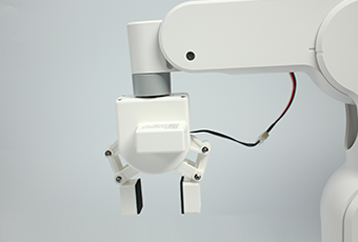
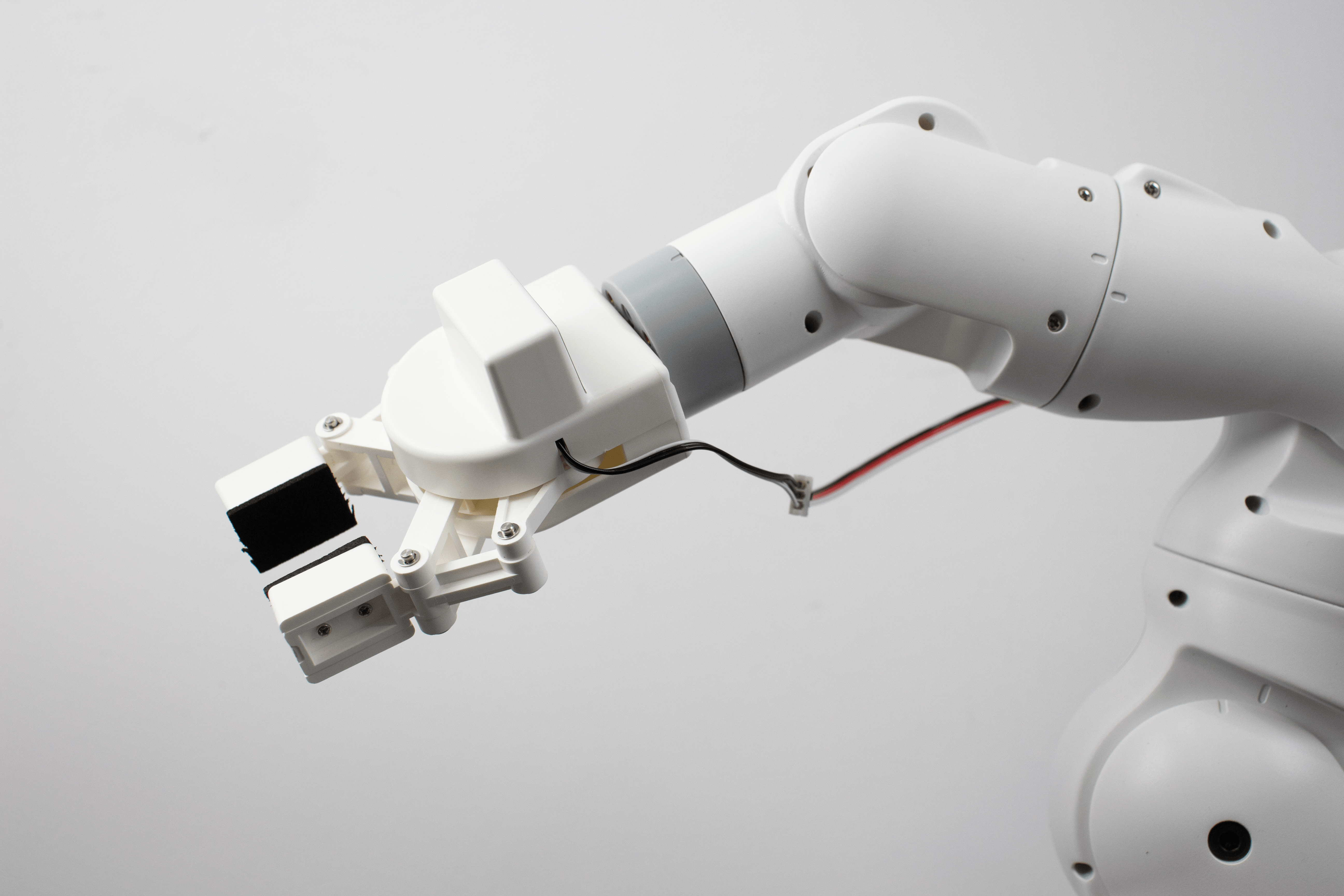
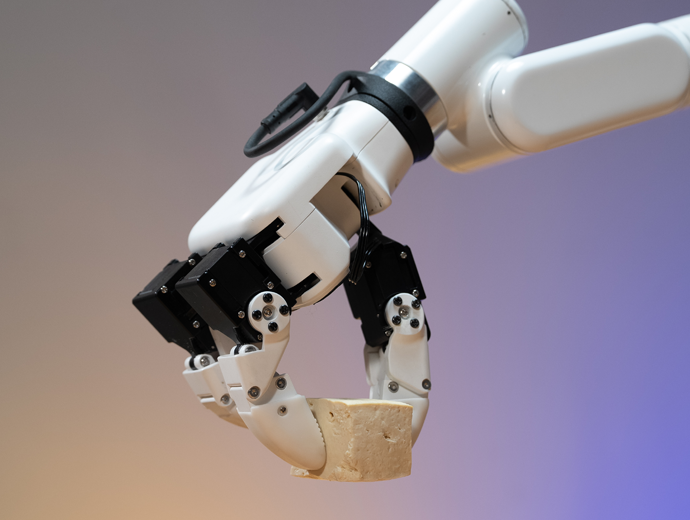
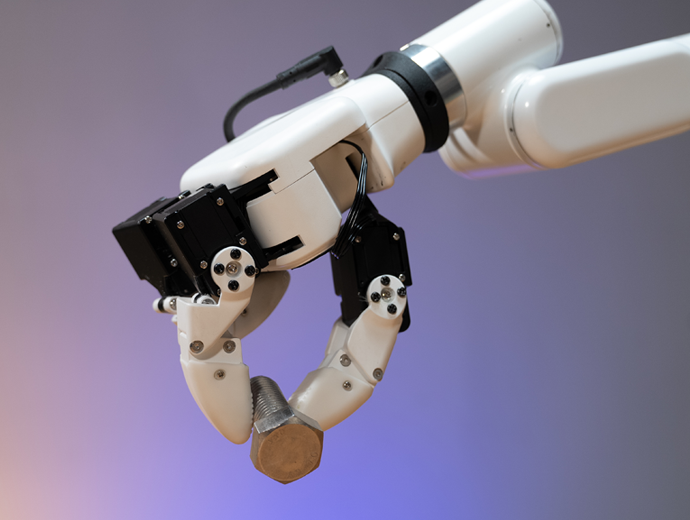
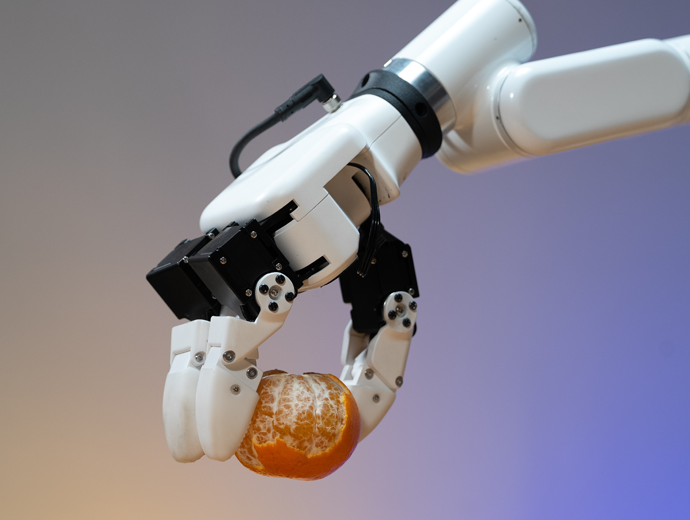
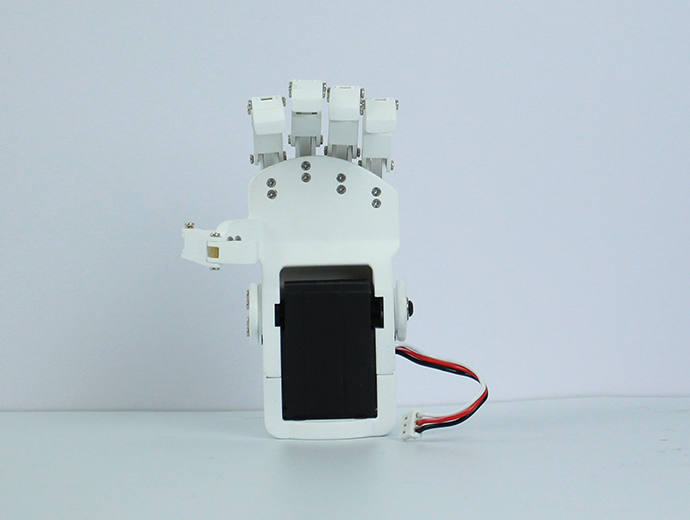
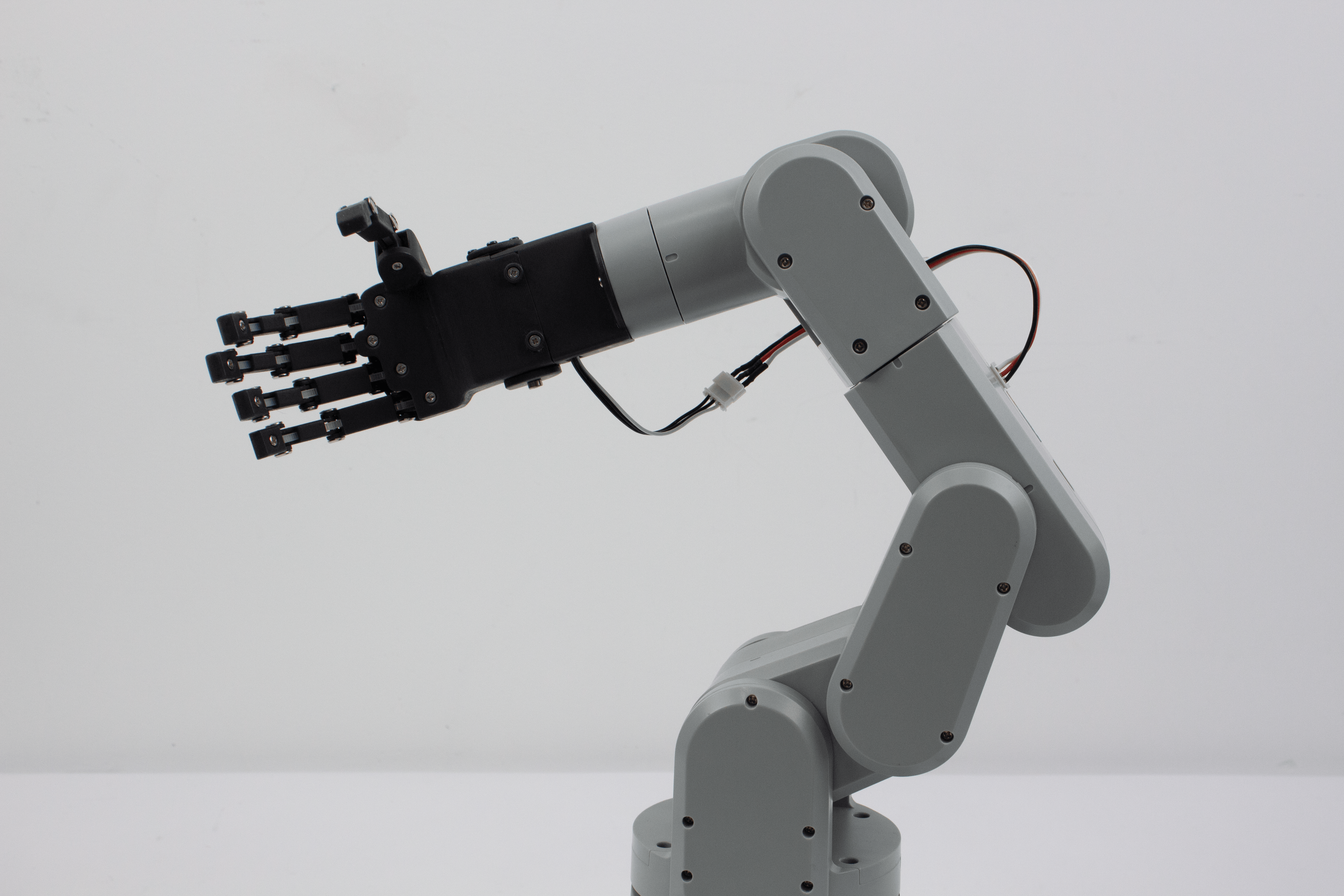
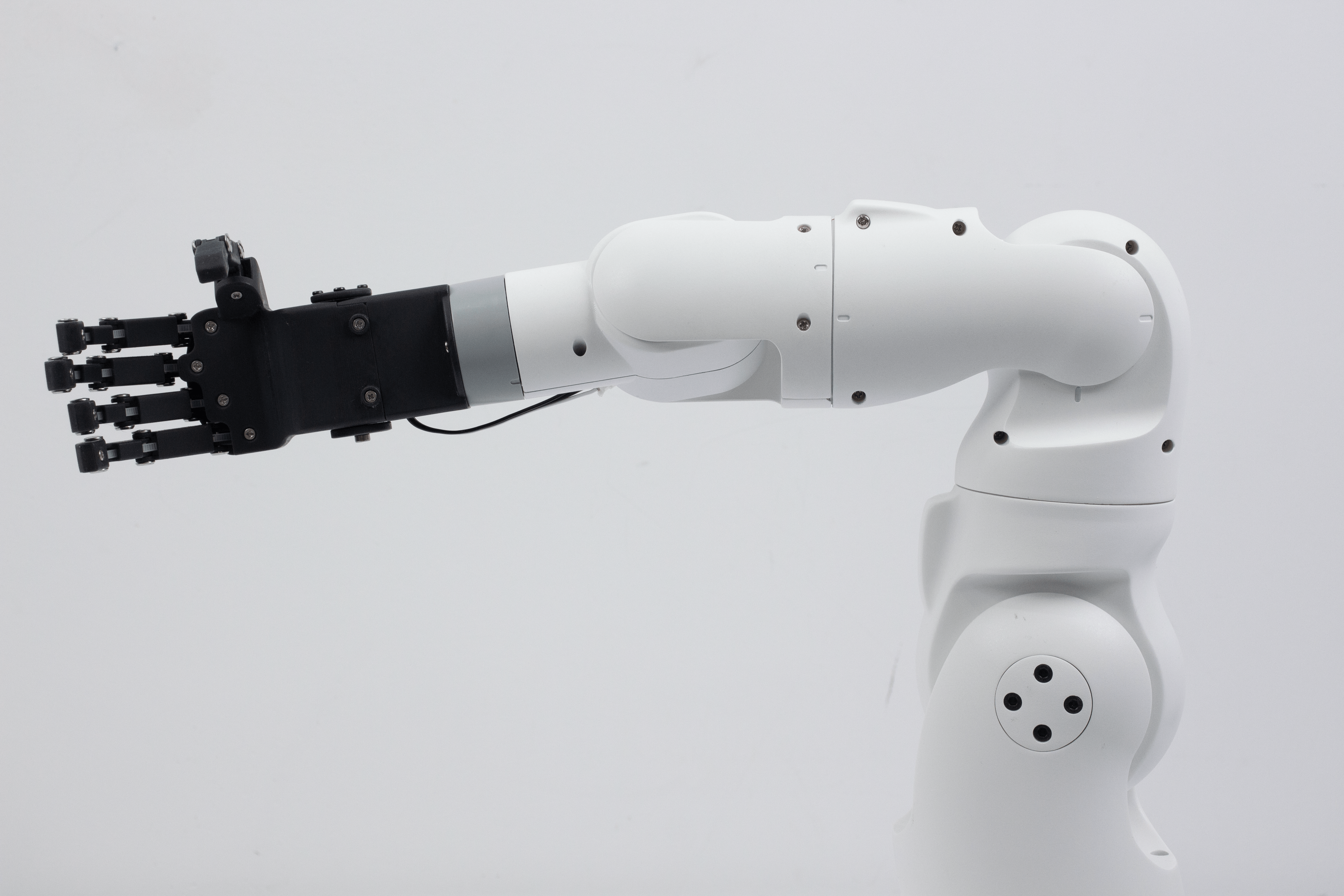
myGripper H100 |
| Payload |
500g |
| Self-Weight |
780g |
| Stroke (Diameter) |
0 – 130mm |
| Motion Speed |
60 degrees per second per joint |
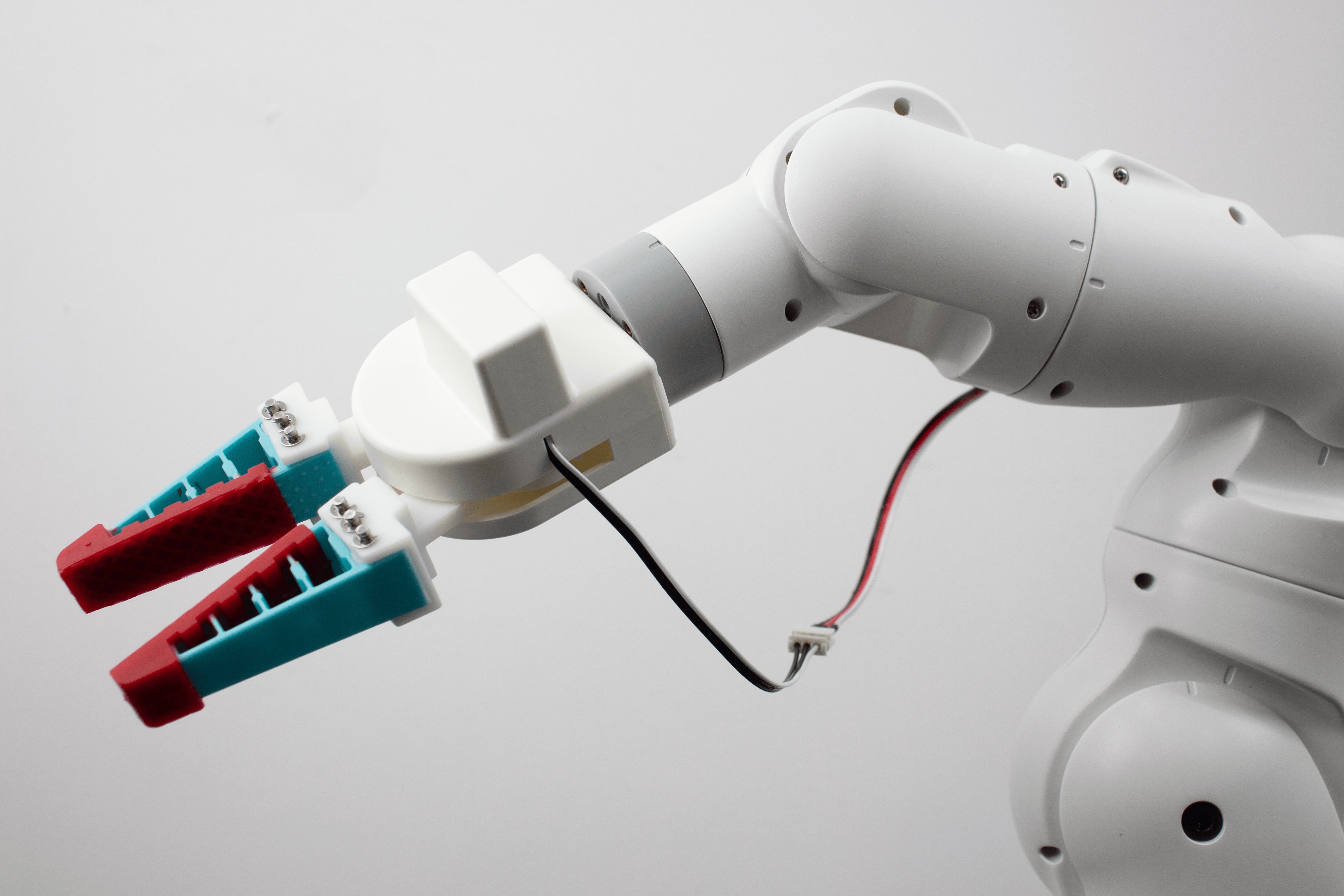
| Number of Fingers |
3 fingers (corresponding to the human thumb, index finger, and ring finger) |
| Movable Joints |
6 |
| Motor Type |
Servo motor supporting current, position, and speed control |
| Lifespan |
1,000,000 cycles or more |
| Electrical Interface |
M8 Pin aviation connector |
| Power Parameters |
24V, 2A |
| Communication Interface |
RS485 |
| Communication Speed |
Above 50Hz |
| Data Format |
Hexadecimal (Hex), 8N1 |
| Protocol Type |
MODBUS |
| Programming Language |
Python |
| Simulation Software |
ROS (RViz) |
| Recommended Control Methods |
Single-finger press: thumb, index finger, or middle finger
Two-finger pinch: thumb + index finger, or thumb + middle finger
Two-finger clamp: index finger + middle finger
Three-finger grasp: thumb + index finger + middle finger |
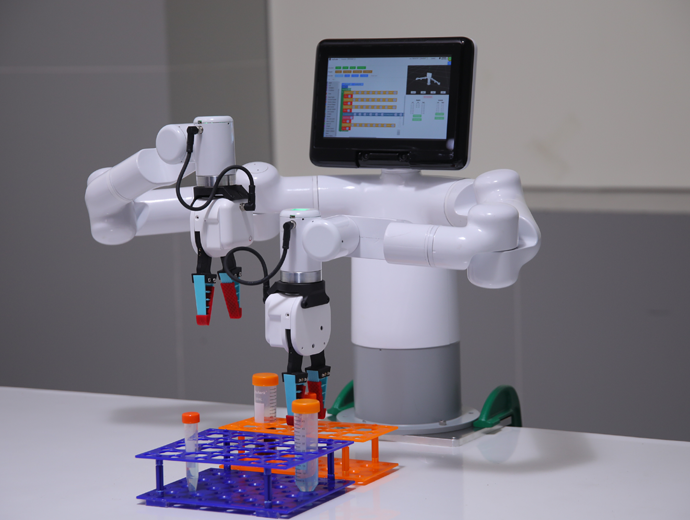
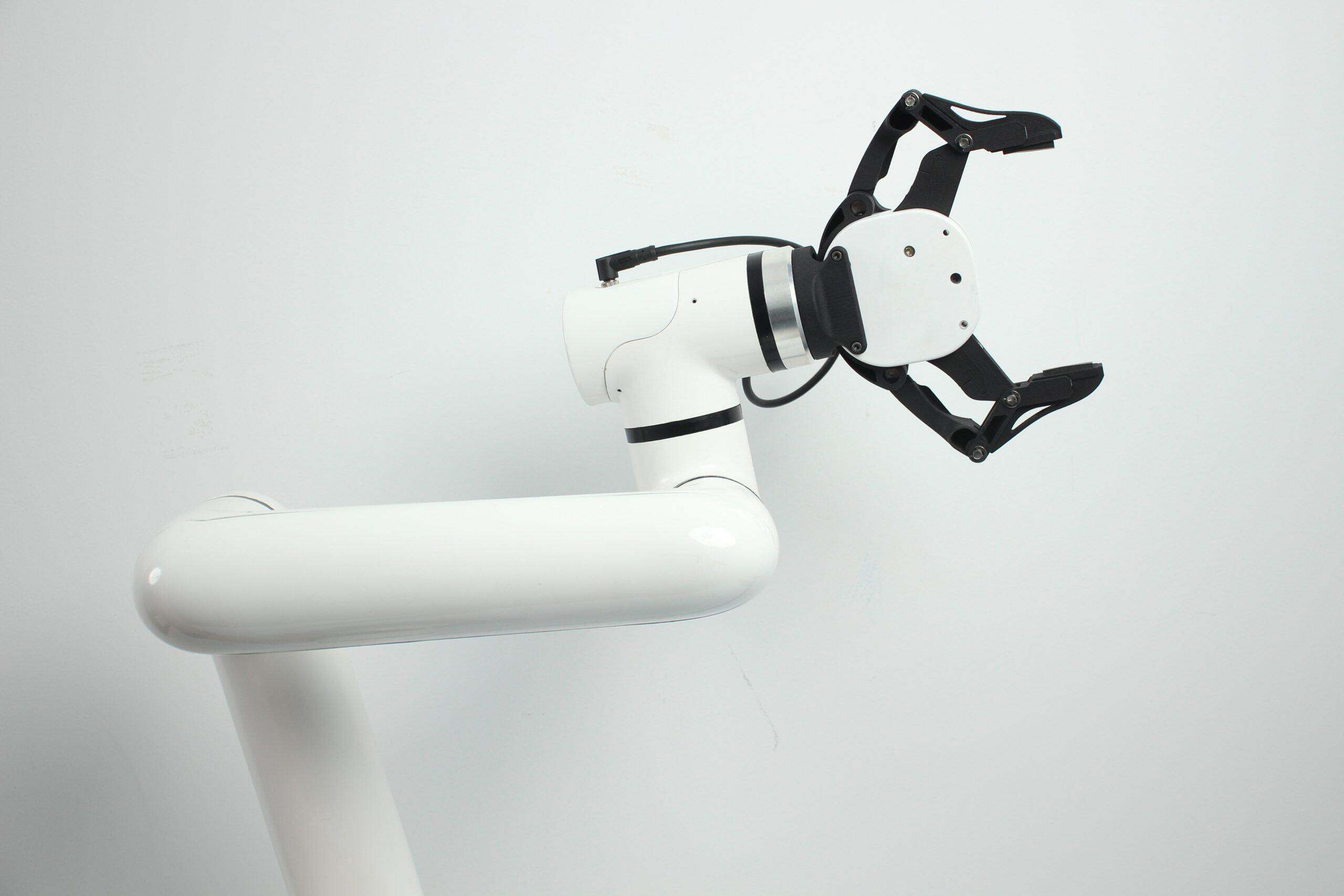
| Compatible Models |
myCobot Pro 630, Mercury series |
| Main Control Chip |
ESP32 |
| Main Control Parameters |
240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode Bluetooth |