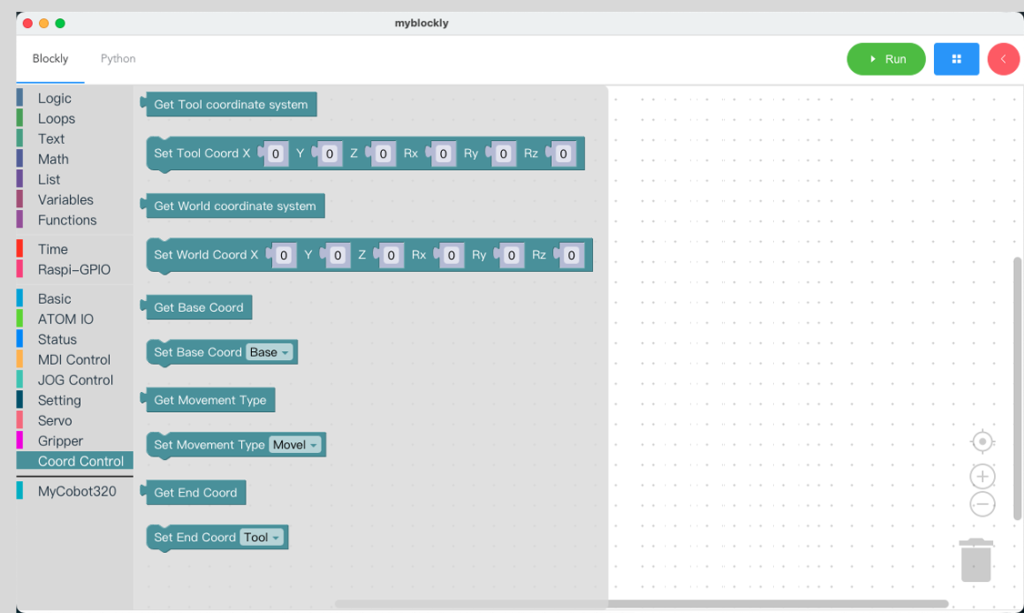
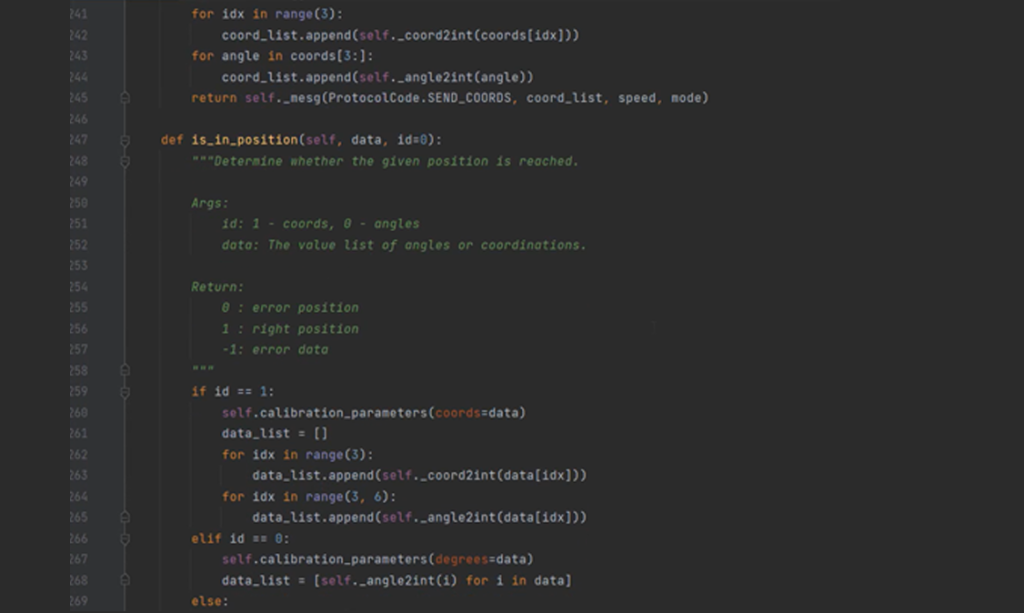
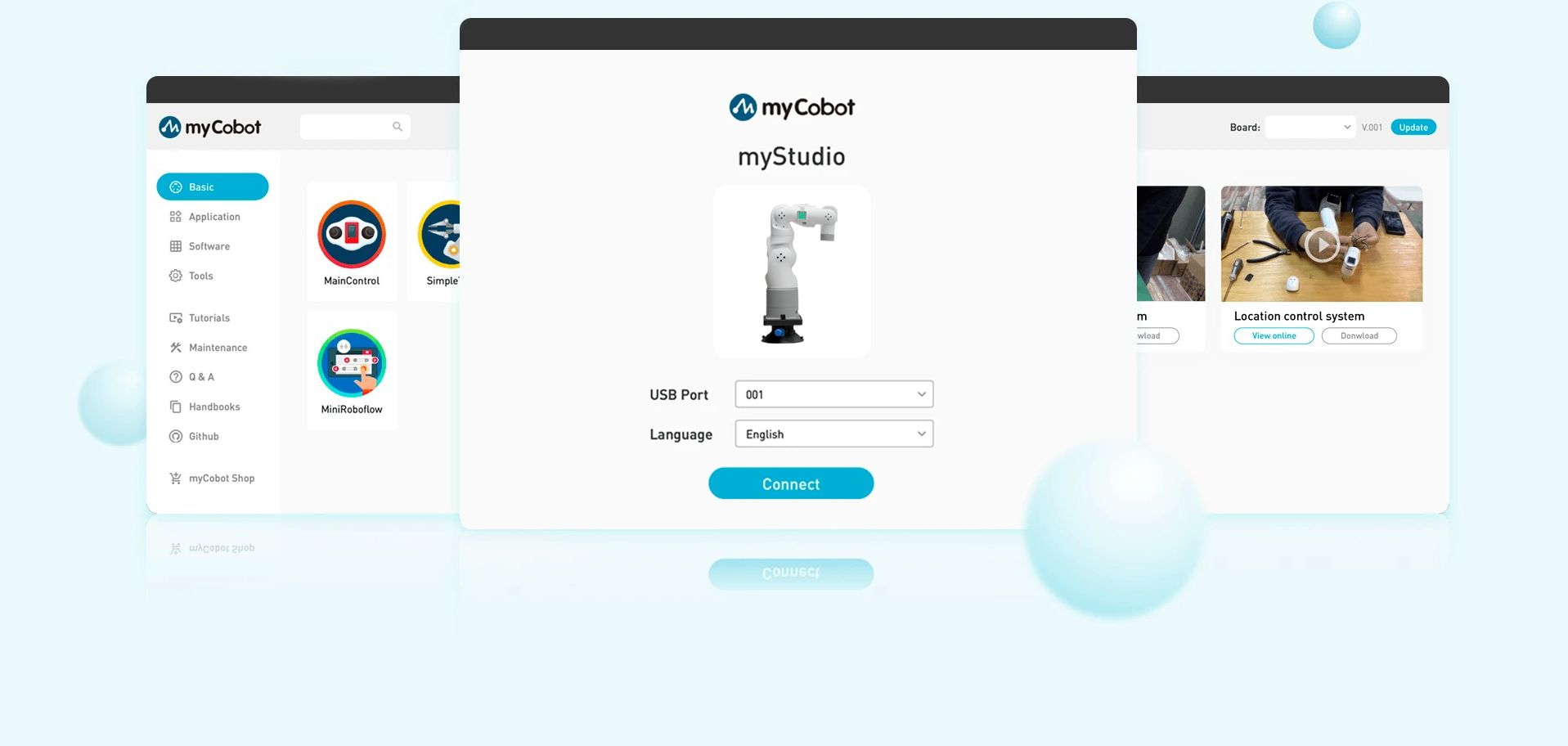
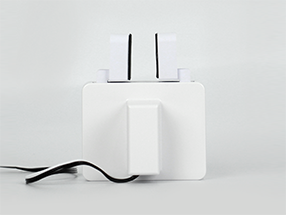
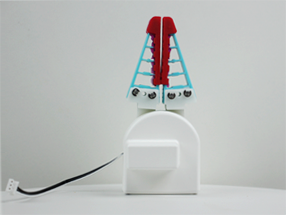
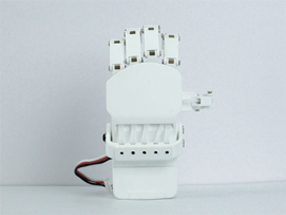
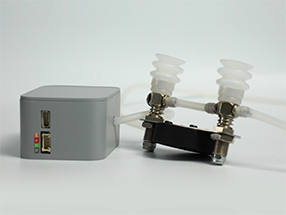
myArm 300 PI 2023 产品特性 技术参数 使用手册 前往淘宝 前往京东 产品功能与应用 myArm 300 Pi 采用树莓派4B核心主板,搭配大象机器人专为机器人定制的Ubuntu Mate 20.04 操作系统,提供近似于桌面级PC电脑的操作体验;因此机器人无需额外搭配PC主控,只用链接显示器、键盘、鼠标等,就可以便捷使用;myArm机器人是快速构建机械臂学科教育、控制逻辑教学、机器人应用、ROS仿真实验课堂的首选助手,帮助您快速开始7轴机械臂学习与应用。 教育科研 myArm提供了7自由度的灵活性,使它超越6自由度机器人,让机器人手臂的移动可以如同人类手臂一样灵活。myArm内置接口可以进行超高难度的肘关节姿态变换,在实践教学中,可以用于机器人姿态研究、机器人运动路径规划学习、机器人冗余自由度的管理和利用、正逆运动学、ROS机器人开发环境、机器人应用开发、编程语言开发和底层数据处理等多种机器人相关的学科教育。 创意开发 myArm机器人基于100%适配myCobot系列配件的产品设计理念,在对结构安装和软件控制方面,都做到了完美适配,极大的扩展了myArm机器人的应用场景。myArm机器人还开放了树莓派4B开发板和末端Atom近乎100%的硬件接口,可以搭配用户个人的树莓派4B及M5Atom的周边配件,进行个性化的场景开发,以满足不同用户的创意开发。 商业探索 myArm机械臂,支持扩展其他上位机配合使用,可以扩展 PC电脑、工控机终端、移动AGV底盘等,适合多种应用场景。myArm产品支持扩展有线和无线等多种连接控制方式,可以满足复杂项目应用需求。myArm搭配不同终端可以实现多种场景应用,如机器人应用模型展示、教育教学套装展示、工业4.0的应用场景展示、复合机器人应用场景展示等。 产品累计销售已超过10000台,运往全球50+个国家 产品参数与功能 工作半径 300mm 自由度 7DOF 树莓派生态 任意摄像头 APP 控制 拖动示教 手柄控制 ROS1仿真控制 ROS2仿真控制 MYBLOCKLY GPIO接口 HDMI接口 实践式新科学课程 Python 硬核配置 硬核的产品配置,完成您的嵌入式开发需求,按键交互,屏幕显示,蜂鸣器,IO接口,你的所思所想,皆可开发。 定制机器人操作系统 采用树莓派4B4G主板作为核心,搭配历时三年定制化开发的Ubuntu Mate 20.04系统,提供近似桌面级PC的使用体验。myArm系统不仅内置ROS1/2、Python等多种开发环境,还内置了如VSCode、VNC、SSH等多种机器人开发软件,无需繁琐配置、即可开始机器人开发应用。还提供自动化更新软件,支持一键更新对应开发环境。摆脱搭建环境的步骤,让机器人应用更简单。 CPU:64-位1.5GHz四核(28nm工艺) GPU:Broadcom VideoCore vl@50OM 机器人编程轻松入门 提供专用于入门级教学的图像拖拽式编程软件 myBlockly ,拼图式编程、图形化调试⼯具,让新手也能轻松驾驭机械臂; Python 2/3 开发环境,支持OpenCV、QT、pymycobot等多种开发驱动库,机器人控制、图像识别、前端开发满足用户的进阶开发需求。 myBlockly Python ROS仿真控制支持 提供ROS1 和 ROS2 多版本的开发支持,不同版本相同扩展⽀持,提供不同版本下的 RVIZ、MOVEIT演示案例,满足用户的深度开发需求。 myAGV + myArm 移动底盘+机械手臂 搭配开发,低成本开始机器人协作、SLAM建图、自主导航、ROS开发环境、七轴协作机器人控制、视觉识别、设备间通信等多种开发内容。 myStudio 一站式的机器人应用平台myStudio 全新升级,告别旧版本无法联网下载最新固件,云端更新、实时同步,进⼀步提高用户使用体验。 前往下载 超多配件,随心搭配 自适应夹爪、摄像头法兰、吸泵等数十种配件,帮助你尽情发挥myCobot的创意想法 前往购买 自适应夹爪 平行夹爪 张角式夹爪 灵巧手 垂直吸泵 双头吸泵 笔夹持器 手机夹持器 摄像头模组 春笋法兰 G型底座 大吸盘底座 myArm 300 Pi 2023 ¥15999 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。