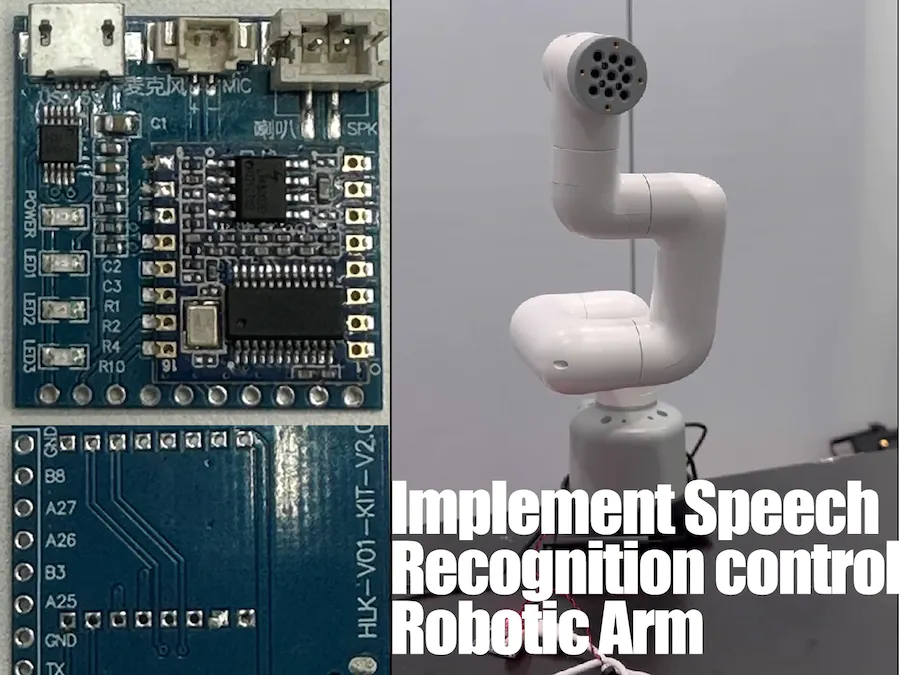
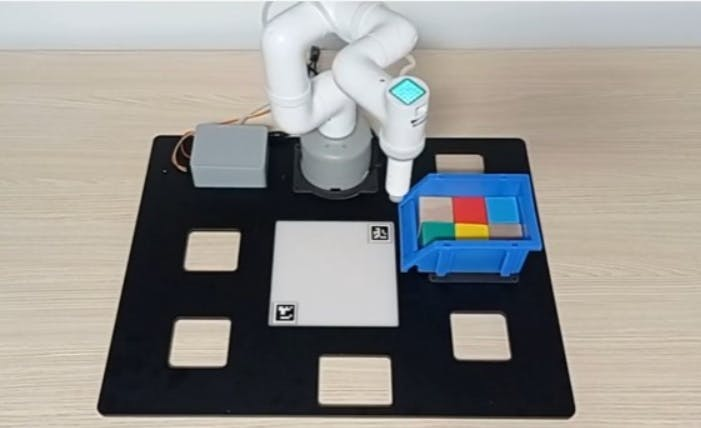
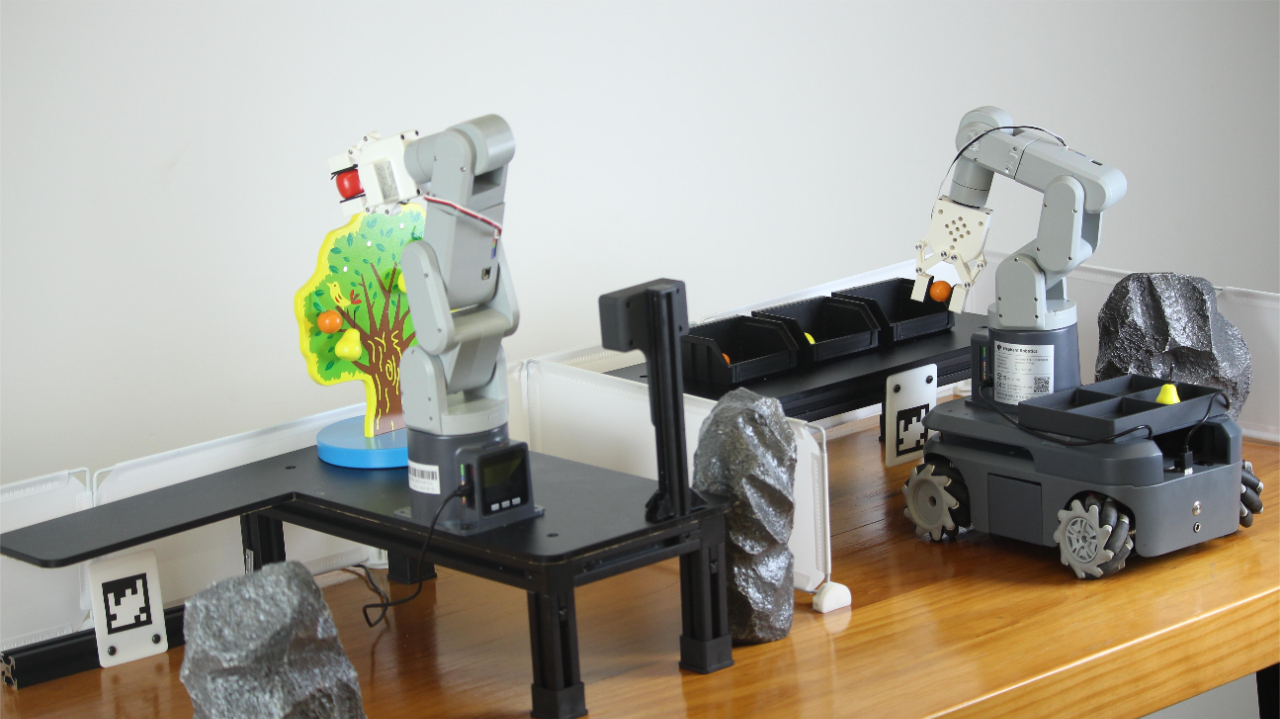
技术案例 让我们一起探索一些有趣的创新技术实例,每个案例都各具特色,让我们来看看这些令人惊叹的技术案例吧! 大象机器人六轴协作机械臂mechArm pi 进行人脸识别项目。 大象机械臂mechArm pi人脸识别项目 Elephant Robotics 使用mechArm 270桌面型六轴协作机械臂,配备摄像头进行人脸识别和跟踪。 六轴机械臂机械臂人脸识别和跟踪 Sina, Elephant Robotics 水果采摘和分拣机器人的应用场景不仅可以帮助学生更好地理解机械原理和电子控制技术,还可以促进他们对科学技术的兴趣和热爱。 机器人学科建设沙盘套件!mechArm机械臂智慧农业3D分拣套装详解 Elephant Robotics 介绍了使用myCobot 280进行Connect4游戏的人工智能研究,采用极小化极大算法、Alpha-Beta剪枝算法和神经网络+深度学习对弈。通过DQN神经网络实现智能体学习与对手对战。 对弈人工智能!myCobot 280开源六轴机械臂Connect 4 四子棋对弈上篇 Elephant Robotics 介绍了使用AI机械臂进行Connect4下棋的实现。包括获取棋盘信息(摄像头识别、处理算法)、处理信息(对弈算法预测下一步)、机械臂轨迹规划等步骤。 对弈人工智能!myCobot 280开源六轴机械臂Connect 4 四子棋对弈下篇 Elephant Robotics 目标是开发一个能够准确识别和跟踪物体的机械臂系统,以便在实际应用中发挥作用,这个项目涉及到许多技术和算法,包括视觉识别、手眼协同和机械臂控制等方面。 使用myCobot 280 Jeston Nano进行物体精确识别追踪 Elephant Robotics 深度相机可以捕捉深度信息,因此可以获得物体的三维信息。这些相机使用各种技术来测量物体的深度,如结构光、时间飞行和立体视觉等。 3D深度视觉与myCobot 320机械臂无序抓取 Elephant Robotics 使用RealSense D455的空间识别操作6轴协作机械臂myCobot 280 M5。 使用RealSense D455的空间识别操作myCobot Elephant Robotics 使用由 Nvidia 开发的 Isaac Gym,实现从创建实验环境到仅使用 Python 代码进行强化学习的所有目标。 使用Isaac Gym 来强化学习myCobot 机械臂执行抓取任务 Elephant Robotics 探索 Jetson Nano 为 myCobot 280 提供的强大功能,机器人技术的一个有前途的组合。 探索 Jetson Nano 为 myCobot 280 机械臂提供的强大功能 Elephant Robotics 机械臂是一种可编程的、自动化的机械系统,它可以模拟人类的动作,完成各种任务,例如装配、喷涂、包装、搬运、焊接、研磨等。由于其高度灵活性和多功能性,机械臂在现代社会中已经得到了广泛的应用。 myCobot 280 2023机械臂全新功能,手柄控制、自干涉检测 Sai Vemprala 基于语音识别技术的机器人手臂控制智能化尝试 实现使用语音控制myCobot机械臂运动 Elephant Robotics 我们将 ChatGPT 的功能扩展到机器人,并通过语言直观地控制机器人手臂 myCobot机器人ChatGPT应用:设计原则和模型能力 Elephant Robotics myCobot 280 M5Stack 2023是一款高性能桌面型机械臂,其强大的功能和多种新特性使其成为教育、科研和轻型制造等领域的理想选择。 大象机器人myCobot 280 2023版全新功能展示 i olll 主要内容是描述如何用myCobot320 M5Stack 2022 和 DSee-65X全息投影设备来实现裸眼3D的展示。 大象机器人开源六轴机械臂myCobot 320全息投影 i olll 从ROS介绍、环境配置到使用MoveIt进行运动规划,详细说明了创建URDF文件、加载到ROS服务器、配置MoveIt等步骤。 使用ROS与Movelt实现myCobot 280运动轨迹规划和控制 Elephant Robotics 该创新解决方案将模拟自动水果采摘机与水果分拣和配送自动化的复合机器人结合起来,为学生提供了在最热门和最有发展趋势的技术领域的全面学习体验。 创新实践,复合机器人采摘运输教育沙盘案例研究 Elephant Robotics myAGV 是 Elephant Robotics 的一款自动导航智能车辆, 它采用了竞赛级别的麦克纳姆车轮和带有金属框架的全包裹设计。 myAgv智能移动底盘的slam算法学习以及动态避障 i olll 动态避障是指在移动机器人或自动驾驶汽车等智能移动设备在行进过程中,通过实时感知周围环境的变化,采取相应的措施以避免与障碍物发生碰撞的技术。 myAgv的slam算法学习以及动态避障下篇 i olll 用机械臂+相机是想物体的抓取,不只是一个平面的抓取,而是一个能够根据获取的深度信息进行判断高度的抓取。 myCobot Pro600六轴机械臂与3D深度视觉:物体精确识别抓取堆叠 Elephant Robotics 1