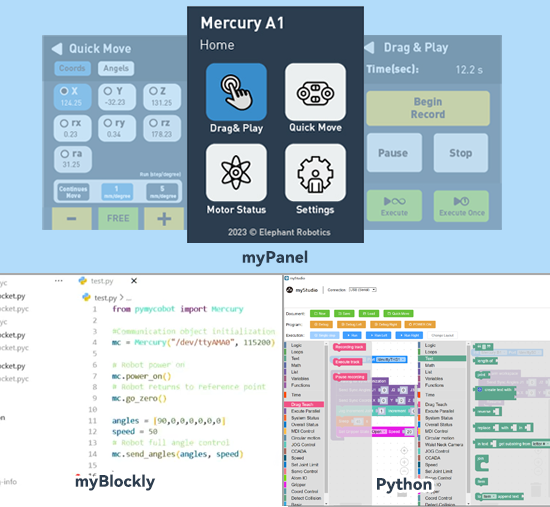
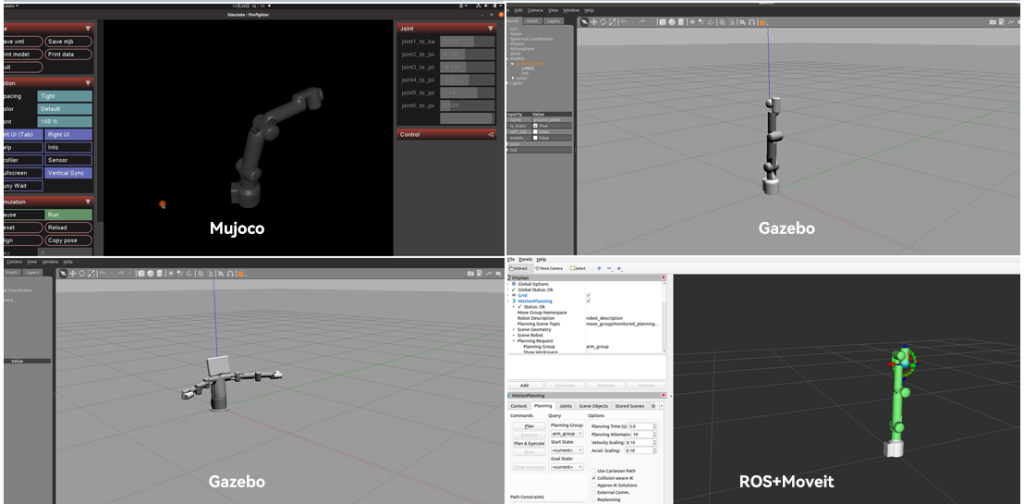
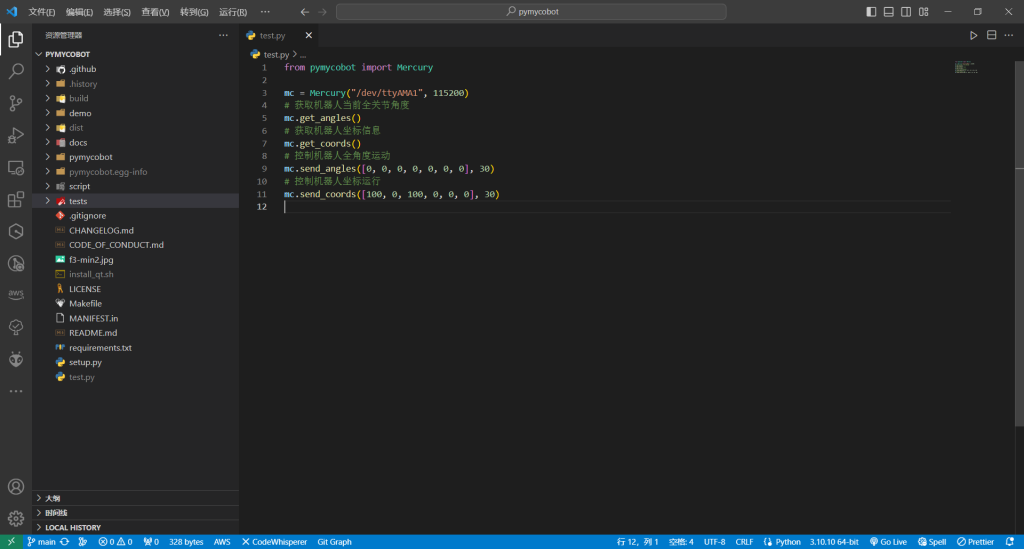
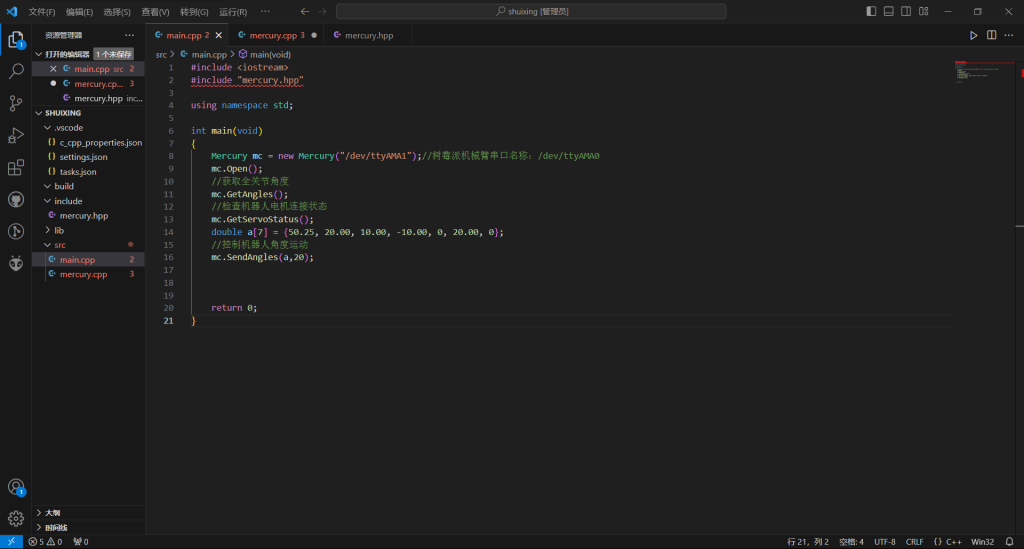
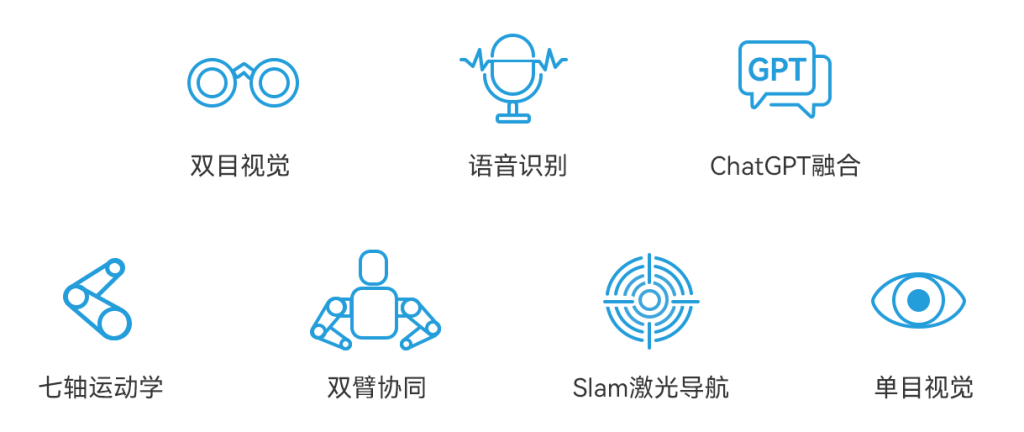
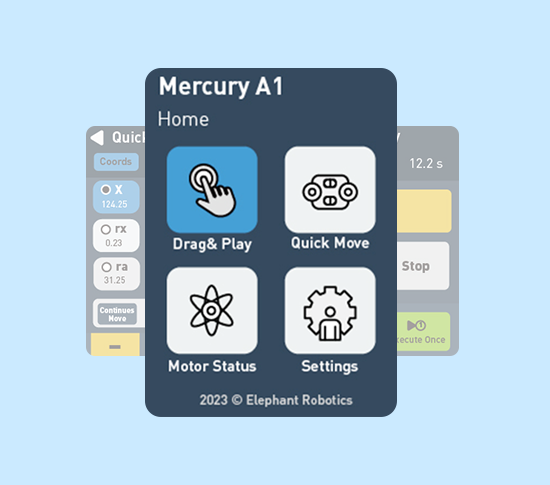
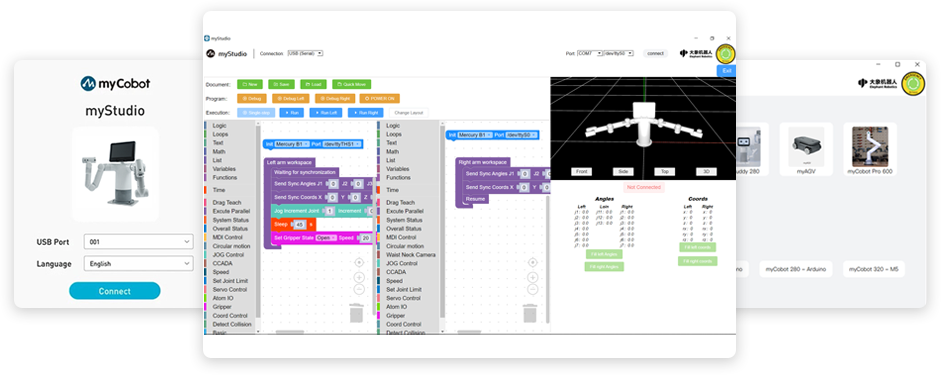
水星Mercury A1 机器人 产品特性 技术参数 支持中心 使用手册 前往淘宝 前往京东 产品核心功能 全新自研”力源“谐波模组 ____ MercuryA1搭载7颗大象机器人全新自研”力源“系列谐波模组。最大输出扭矩可达80Nm,编码器分辨率19bit,重复定位精度高达0.6弧分;全新的七轴工业设计由瑞典团队精心操刀,整机使用超轻量碳纤维外壳,减重的同时大幅提高整机强度和刚性。 开源主控,一触即达 ____ 水星Mercury A1采用单主控,双副控控制方式。主控采用Cortext A72 - 1.5GHz、搭载2.0英寸IPS-LCD电容触摸屏,配合大象机器人自主开发的机器人便捷开发操作系统myPanel OS,可实现无需编程的快速部署应用。 多元软硬件生态 ____ 水星Mercury机器人首次集成3大软件操作方式和10余种硬件配件,包括各式夹爪、吸泵,和相机。同时提供机器人教育教学套装,协助多个学科不同领域的软硬件知识学习。 ____ 水星Mercury机器人系列坚持大象软件开源传统,支持丰富的软件生态和主流编程语言。 同时支持包括ROS1, ROS2, Moveit和 Mujoco等主流仿真软件,便于用户使用机器人在仿真系统里模拟机器运动,提高了智能自主学习和快速迭代的能力。 多元软件生态,支持主流仿真平台 支持二次开发 ____ Python API - pymycobot pymycobot 是一个通用的 Python 控制库,旨在支持多款大象机器人旗下机器人,提供了一个简单而灵活的接口,方便开发者对机器人进行控制。 C++ API - Mercury Mercury API是一款专为Mercury机器人设计的C++控制接口。简洁易用,提供对机器人关节、姿态和执行器的灵活控制,助力开发者快速实现各类机器人应用。 七大集成算法,打造机器智能 水星机器人产品系列首次集成七大智能算法,整体提升机械臂运动学和动力学表现,抑制震动,双臂流畅协同。与视觉,激光和语音传感器的深度融合在人工智能的加持下全方位打造立体的机器智能。 全新自研操作软件 myPanel ____ 水星A1机械臂内置的“myPanel”搭配两英寸的触摸屏,可实现机械臂的快速示教编程,部署调试,无需任何额外硬件设备。 myBlockly ____ 全新的myBlockly引入了创新性的双编辑栏功能,为用户提供了更加便捷和高效的编程体验。同时,myBlockly还兼容底座 SLAM控制模组,使得编程和底座控制能够无缝结合,进一步扩展了其应用领域。通过预设的快捷指令,用户可以快速编写左右双臂的控制程序,实现双臂的高效协同工作,从而达到“1+1>2”的效果。 VR实时操控 ____ 同时配合最新meta Quest3开发的水星VR遥操(MVRM),可实现低时延的VR实时控制,为特殊危险场合提供全新的机器人解决方案。 应用场景 教育场景 科研场景 3D SLAM 自动导航 服务场景 娱乐场景 VR遥操作场景 丰富硬件生态 水星机器人系列提供完整的辅助硬件,包括各式夹爪,吸泵,并且可以同时搭配2D和3D视觉组合使用,真正实现机器人“手眼合一”。