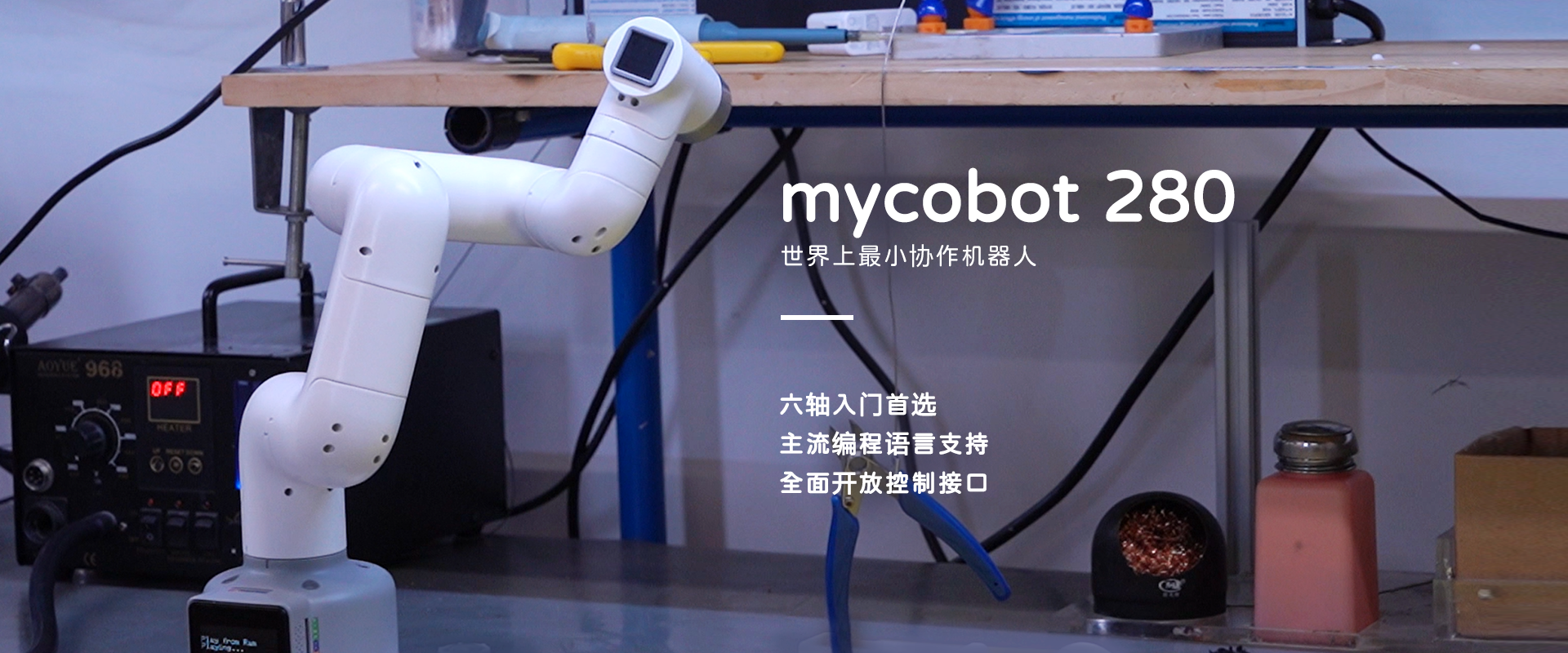
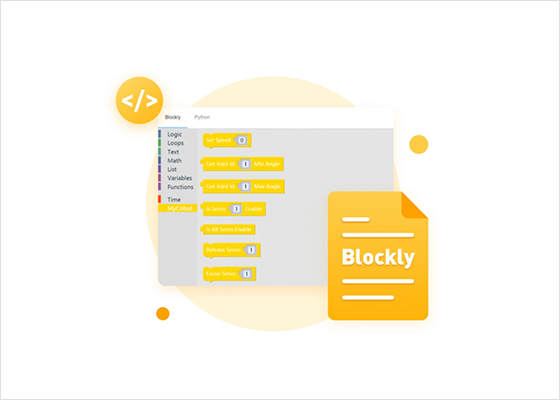
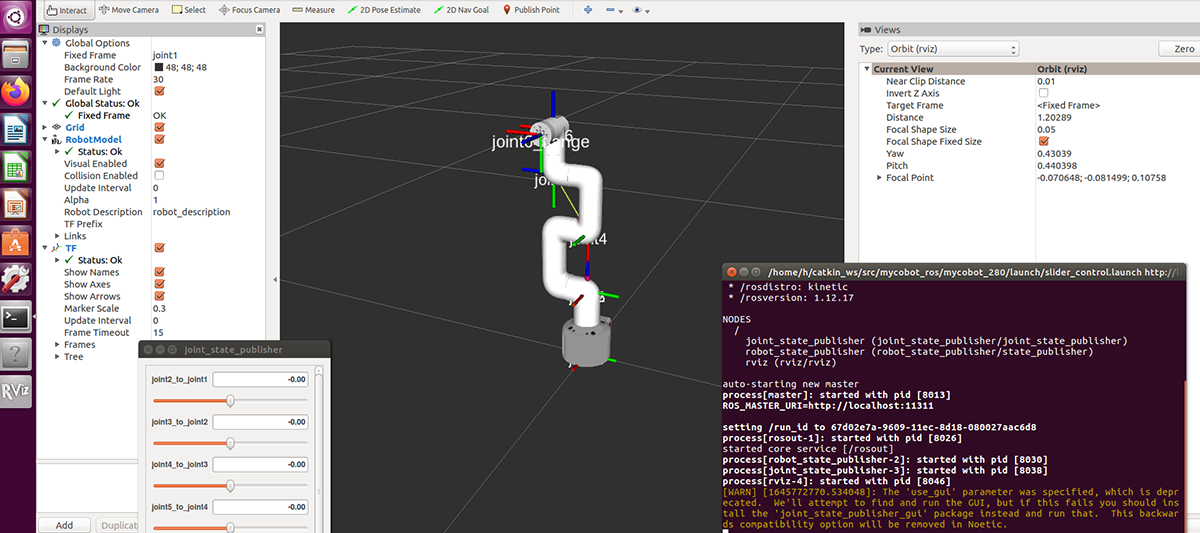
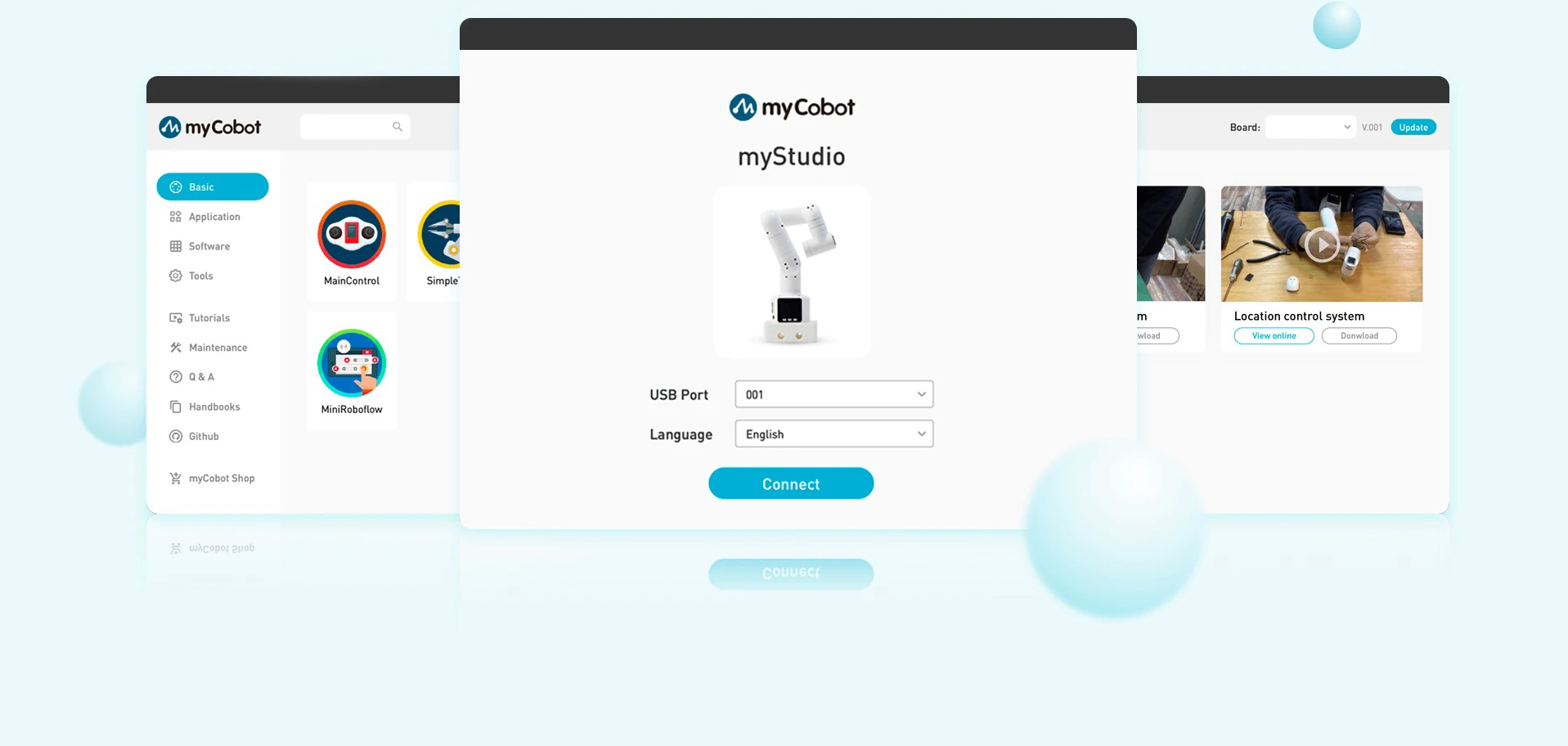
ER myCobot 280 Pi 产品特性 技术参数 myCobot-Pi使用手册 资料下载 立即购买 树莓派生态专属协作机械臂 ER myCobot 280 Pi ,采用树莓派微处理器,内置ubuntu18.04系统,无需搭配PC主控,链接外设,即可快速构建机械臂 编程教育、机械臂控制逻辑开发,ROS仿真实验课堂,是您快速开始六轴机械臂学习的首选。 实践教学 LINUX系统开源生态、python驱动库、myblockly支持、 链接拓展,即刻开始机器人应用开发。 创意开发 树莓派原生硬件接口,数十种官方执行器,末端 Lego接口可接各种传感器,实现颜色识别追踪, 二维码以及手势识别、语音播报等,让你从零搭 建ER myCobot 280 Pi编程环境,玩转机器人。 产品特点 工作半径 280mm 负载 250g 树莓派生态 任意摄像头 USB*4 拖动示教 lego接口 HDMI接口 C++ MYBLOCKLY GPIO接口 ROS仿真控制 实践式新科学课程 Python 硬核配置 硬核的产品配置,完成您的嵌入式开发需求,按键交互,屏幕显示,蜂鸣器,IO接口,你的所思所想,皆可开发。 基于树莓派4B主板 强大的AI计算能力,树莓派Al新高度,拥有树莓派4B强劲性能支持,Al算力大幅度提升。 CPU:64-位1.5GHz四核(28nm工艺) GPU:Broadcom VideoCore vl@50OM 简单开发 轻松入门使用,拖曳式编程语言,按键交互式拖动示教,让你轻轻松松开启机械臂使用之旅。 myblockly python demo 主流编程语言支持 我们支持 python、c++、c#等 。 支持更多传感器拓展 自带图像识别算法,可选配任意摄像头;自主搭配显示器、夹爪吸泵等不同配件,实现更多应用化场景。 ROS仿真控制系统 自带ROS应用环境,通过Ubuntu18.04系统,简化6自由度串行总线航机复杂运动控制。 myStudio 一站式的机器人应用平台机器人驱动安装,机器人固件升级,使用文档阅读,视频教程观看等多种功能 前往下载 ER myCobot 280 Pi开箱视频 ER myCobot 280 Pi ¥4799 起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。