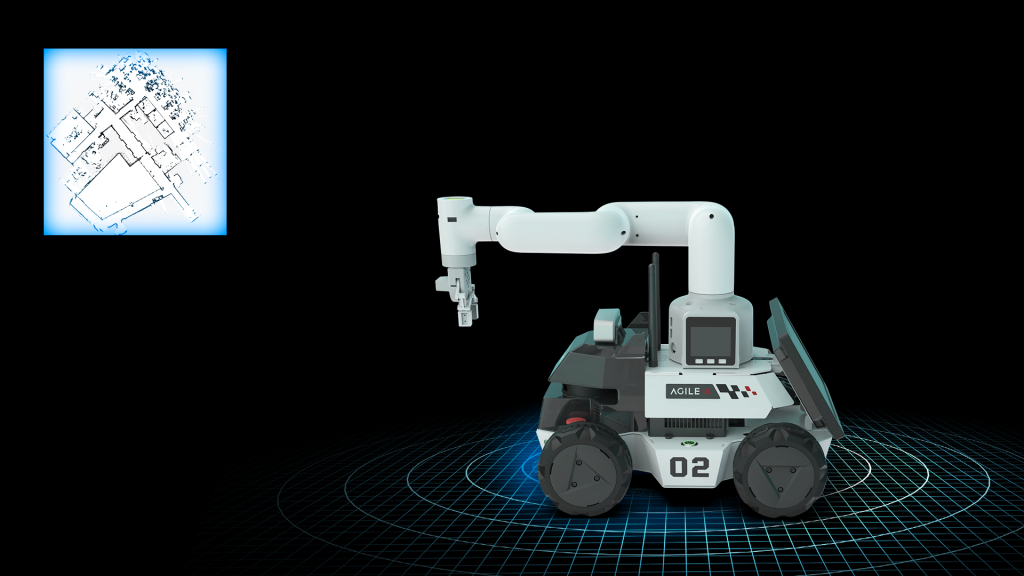
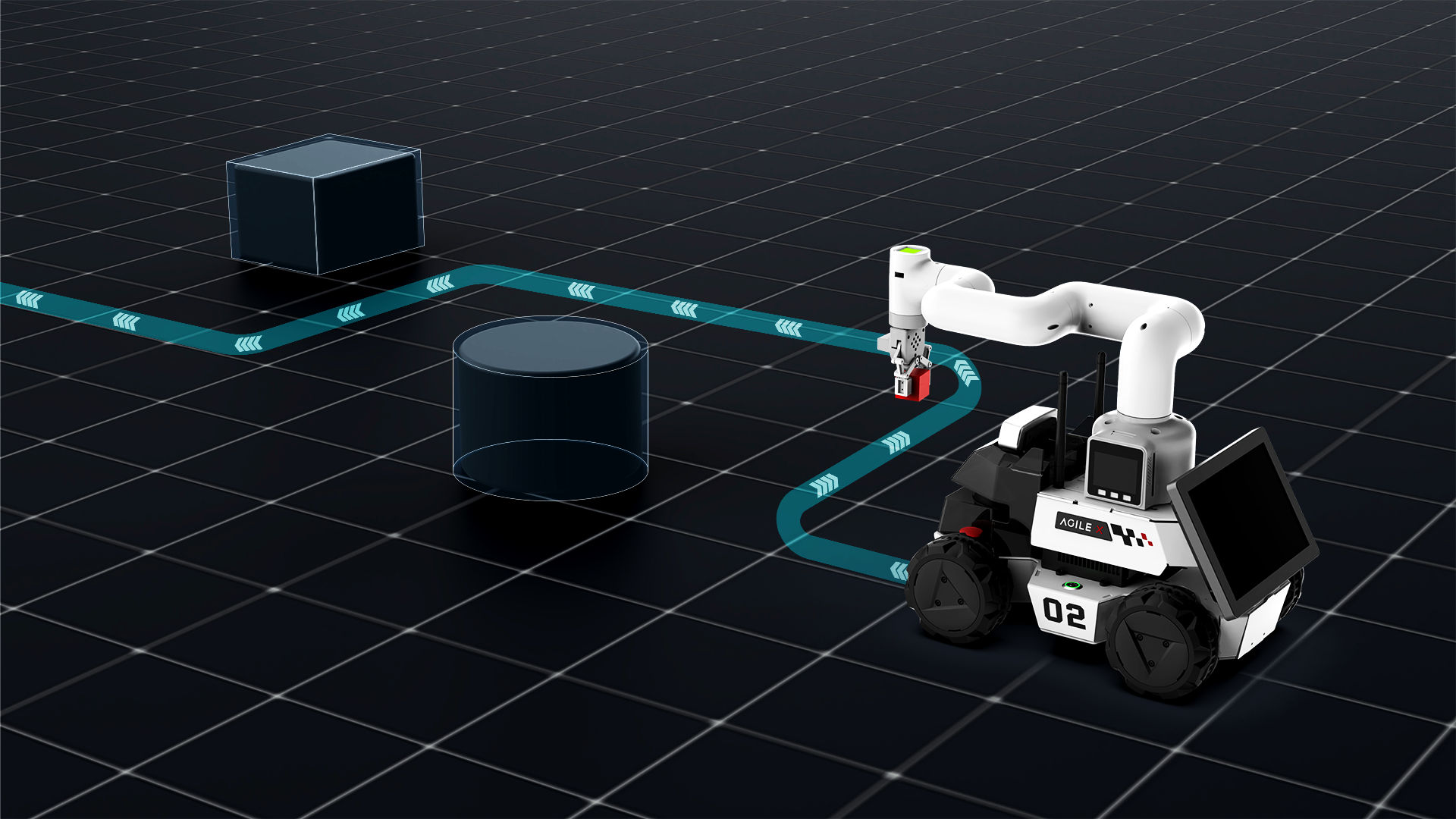
ROS 2 多模态移动抓取机器人平台 LIMO Cobot 产品特性 技术参数 使用手册 前往淘宝 前往京东 产品功能与应用 LIMO Cobot是大象机器人、松灵机器人联合推出的一款桌面级的移动抓取机器人平台基于大象myCobot 280 M5六轴协作机械臂、松灵LIMO PRO的最新抓取机器人产品,它集成了移动、协作和智能三大功能,适用于教学、竞赛和培训等领域。 移动抓取 LIMO Cobot配备机械臂,支持多种末端执行器,使其能够实现精准的移动抓取,适应不同任务需求。 自主探图 LIMO Cobot能够自主探测和构建环境地图,为机器人在复杂环境中的导航提供准确的数据支持。 智能避障 LIMO Cobot能够智能感知周围环境,并灵活规避障碍物,确保在执行任务时的安全性。 开源支持 支持ROS和Gazebo,并兼容Python、C++等主流编程语言。这为开发者提供了灵活的开发环境,降低了开发门槛。 强大底盘 LIMO Cobot的底盘配备了EAI mini-T Pro激光雷达、奥比中光深度相机、IMU等先进传感器,确保了出色的操控性能。 它采用了四个轮毂电机驱动,提供了卓越的稳定性和机动性,可以在各种地形环境中自如运动。 更重要的是,它能够根据地形需求切换四种模式:阿克曼、四轮差速、麦克纳姆轮和履带,这是其他移动机器人所不具备的功能。 阿克曼 四轮差速 履带 麦克纳姆轮 复合应用 LIMO Cobot搭载大象机器人myCobot 280 M5机械臂组合成复合机器人。 myCobot 280M5自重850g,有效载荷250g,有效工作半径280mm;体积小巧但功能强大,可搭配多种末端执行器适配多种应用场景,支持多平台软件的二次开发,满足科研教育、智能家居,商业探索等各种场景需求,搭配不同末端可实现多种应用。 LIMO PRO LIMO Cobot搭载了Nvidia Orin Nano工控机,使LIMO Cobot获得更强的环境感知和理解能力,可以实现自主导航与避障、自主探图、移动抓取、视觉识别等功能 。 它提供了开放式接口和丰富的ROS教程案例,适合教学、竞赛和培训等用途。 移动抓取 自主导航 视觉识别 自主探图 ROS2仿真控制支持 LIMO Cobot搭载了ROS 2的开源机器人软件平台,它为LIMO机器人提供了丰富的开发工具和功能库,可以帮助用户快速学习和开发机器人应用程序。她可实现RViz、Nav2、Gazebo等不同开发工具。 配套课程 配套课程包括:ROS操作系统、Python编程、移动机器人、机械臂控制、传感器应用、路径规划等。学生可以从基础到综合,全面学习ROS机器人。 购买渠道 如果您对该产品感兴趣,请添加下方对应二维码,我们会为您提供一对一客户支持,如您不方便添加,请联系我们的公司邮箱,期待您的咨询: 售前咨询小管家 sales@elephantrobotics.com marketing@elephantrobotics.com