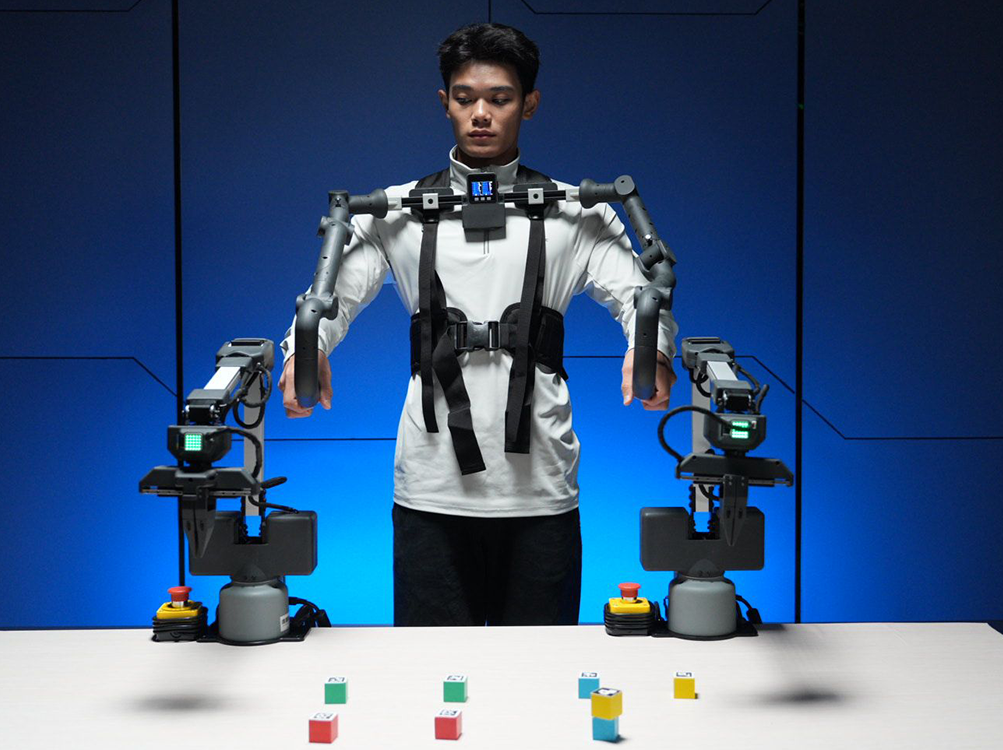
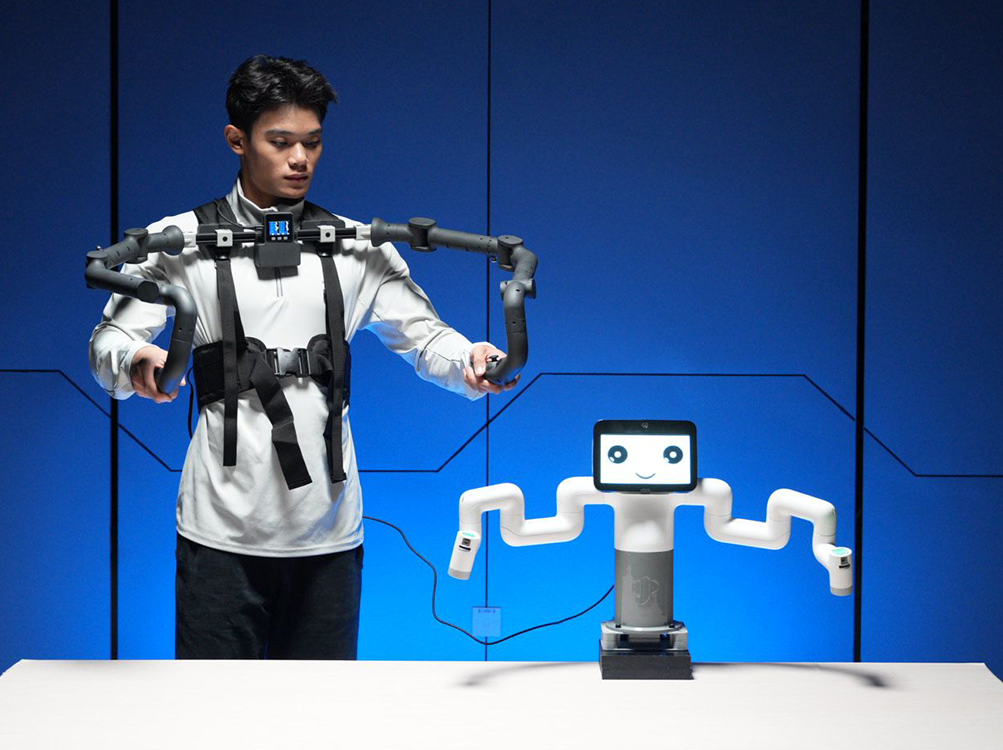
| 产品名称 | myController S570 外骨骼 |
| DOF | 12(6+6) |
| 水平伸展范围 | 单臂570mm |
| 总跨度 | 1500mm |
| 自重 | 1.5kg |
| 电源规格 | 8.4V2A |
| 旋转能力 | +/- 180° |
| 末端执行器 | 双指遥控+ 双按钮控制 |
| USB 连接 | Type-C |
| Atom 末端 | 5*5 LED灯矩阵 |
| 通讯帧率 | 最高 100Hz |
| 主控芯片 | ESP32(Basic) |
| 主控参数 | 240MHz dual core. 600 DMIPS, 520KB SRAM. Wi-Fi, dual mode Bluetooth |
| 核心蓝牙 | 2.4G/5G |
| 核心无线 | 2.4G 3D Antenna |
| LCD 显示器 | 2.0″@320*240 ILI9342C IPS panel, maximum brightness 853nit |
| 实体按键 | 3 |
| 辅控芯片 | ESP32 *2(Atom) |
| 辅控核心参数 | 240MHz dual core. 600 DMIPS, 520KB SRAM. Wi-Fi, dual mode Bluetooth |
| 辅控核心Flash | 4MB |
| LED矩阵 | 5*5 LED灯矩阵 |
| 当前位置 | 读 |
| 当前速度 | 读 |
| 当前加速度 | 读 |
| 按钮状态 | 读 |
| 四向遥感状态 | 读 |
| 陀螺仪数据 | 读 |
| LED灯颜色 | 读/写 |
| 3D-Step | 支持 |
| 2D 规格尺寸 | 支持 |