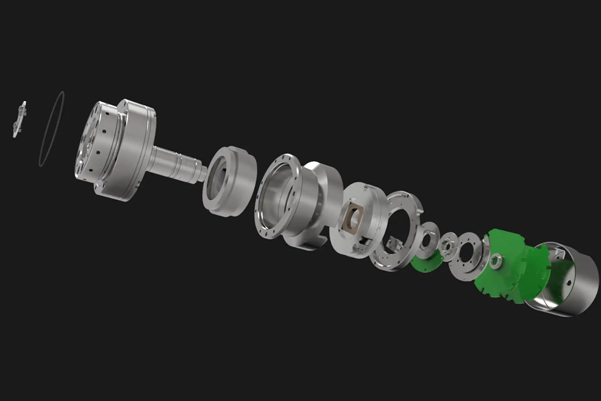
myCobot Pro 630 使用手册 产品特性 技术参数 前往淘宝 前往京东 一体化设计 安全协同作业 一体化集成设计使其能够充分利用生产空间,完美融入实际环境。 兼备基于精确动力学模型的防碰撞检测功能使其能与人安全协同作业。 工作半径 630mm 负载 2000g 性能强大 便捷易用 高标准自研谐波关节模组,高性能品质表现,相对于myCobot Pro 600体积减小30%,负载维持不变。 自研软件 安全可靠 定制Linux操作系统,搭载自研 Roboflow 机器人控制软件,支持7*24小时不间断应用。 产品特点 支持多种编程语言,搭配强大硬件接口,助力机器人应用多领域全面发展,高效实现机器人应用场景开发。 树莓派生态 实践式新科学课程 mystudio Roboflow USB*4 NetWork Port HDMI接口 RS485 Python C++ ROS仿真控制 Gazebo VNC SSH PLC Socket 硬核配置 内置多算力核心、搭配工业级标准机器人接口,强大硬件配置,让您的所思所想成为现实。 全场景扩展支持 开放多种硬件连接接口、为用户提供更加全面、更具有针对性的接口选择,支持USB、EtherNet/IP、RS485、24V-I/O 等多种外设接口连接,满足机器人应用开发的全场景支持。 主流编程语言支持 提供标准Python、C++驱动库,产品更加易用。 全平台开发支持 我们支持Android、Windows、macOS、Linux。 多种连接开发方式 USB WIFI Network Port RoboFlow可视化编程软件 一站式机器人编程控制软件,支持可视化编程交互、快捷移动控制、拖动教学、机器人状态查询配置;支持配置Modbus、VNC、Socket等多种连接支持,协助用户实现机器人简单编程、快速应用。 myCobot 系列一览 仿真系统支持 提供ROS1、ROS2、Gazebo三大软件仿真环境,开源对应环境下的机器人控制驱动文件,提供基础RVIZ、MoveIT使用案例,支持用户自定义集成应用场景。开放机器人3D、URDF文件,支持用户适配更多仿真系统。 应用场景 四大个性机器人应用场景:3D 无序视觉分拣、2.5D 码垛分拣、机器人写字画画、复合机器人移动巡检。提供产品集成支持,涵盖 3D 相机、识别软件、识别算法、执行器、工控机、移动AGV等多种周边设备,满足不同用户的定制化应用需求。 3D无序视觉分拣 2.5D码垛分拣 机器人写字画画 复合机器人移动巡检 myCobot pro 630 开箱视频 myStudio 一站式的机器人应用平台机器人驱动安装,机器人固件升级,使用文档阅读,视频教程观看等多种功能 前往下载 探索myCobot的精彩配件 自适应夹爪、摄像头法兰、吸泵等数十种配件,帮助你尽情发挥myCobot的创意想法 前往购买 卓越客户代表 大象机器人将持续为创新赋能,携手世界各地优秀企业共创美好新生活! 上一页 下一页 合作高校 myCobot Pro 630 ¥35,000起 立即购买 官网所有商品价格仅供参考,实际价格以结算为准。