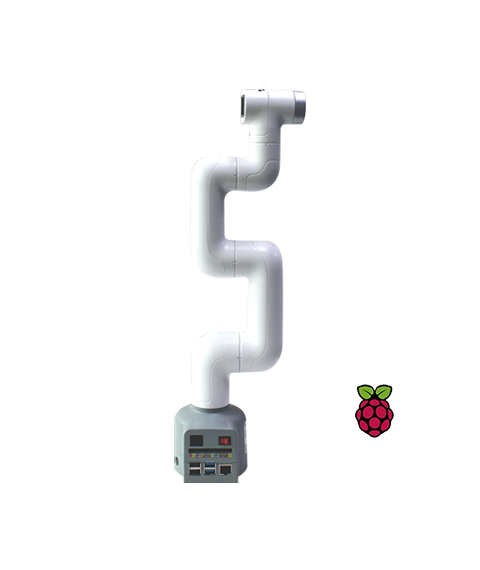
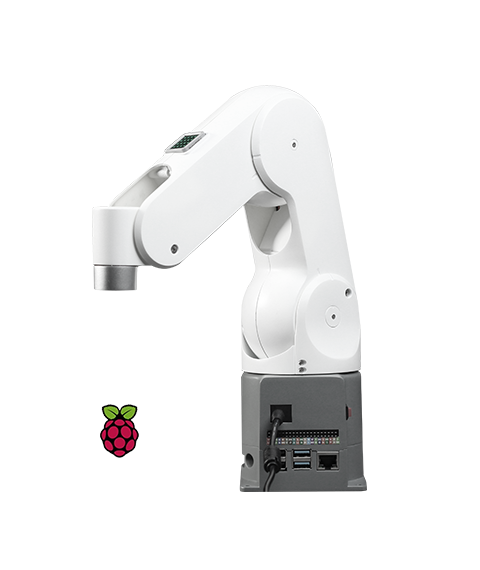
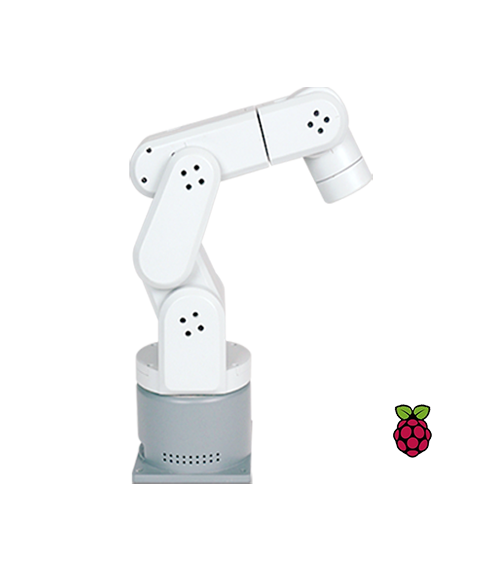
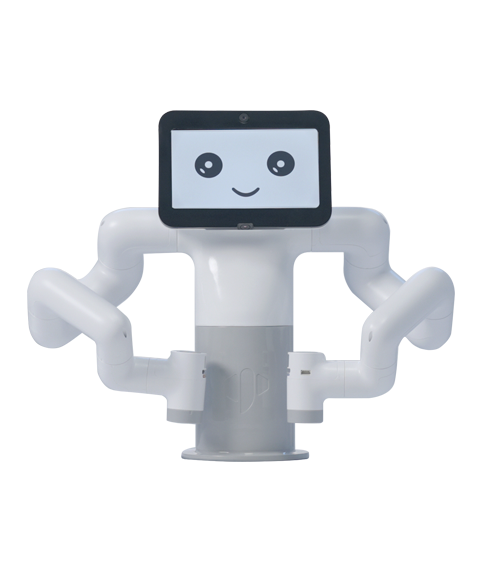
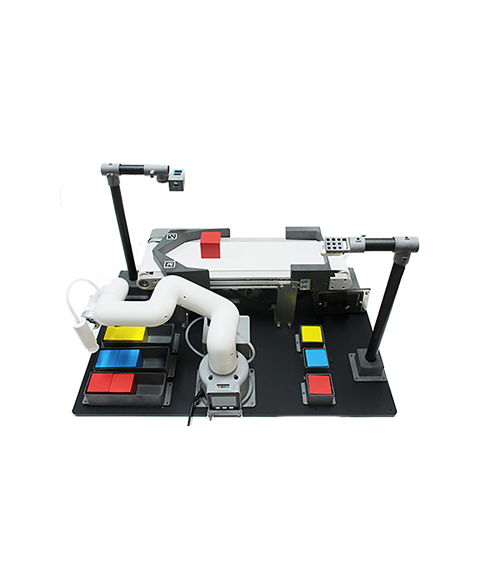
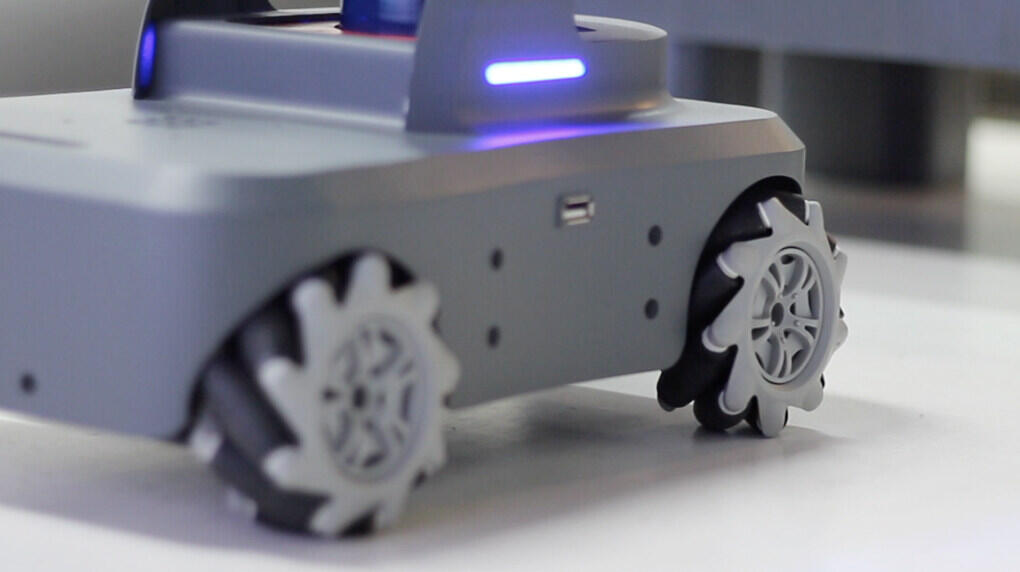
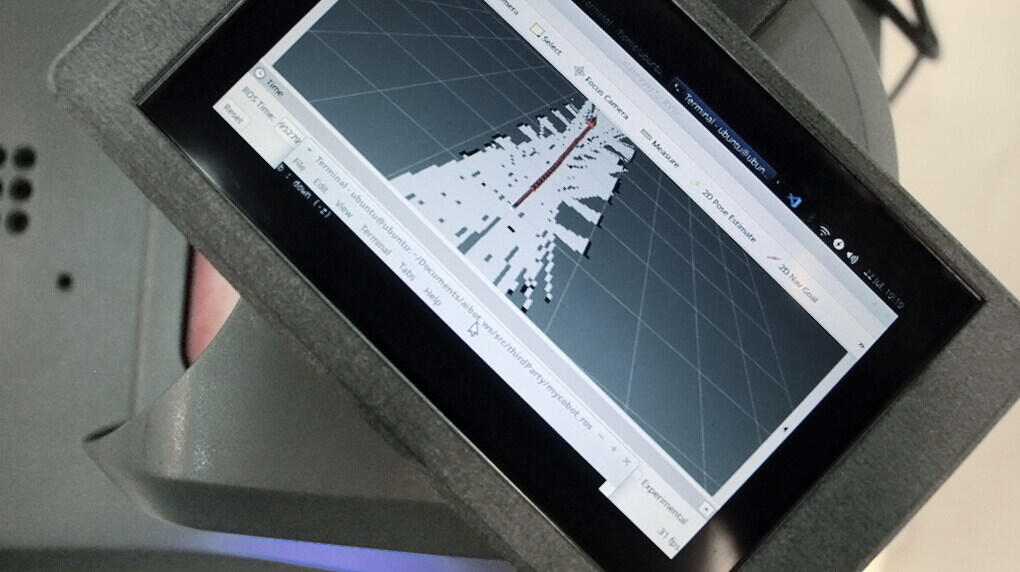
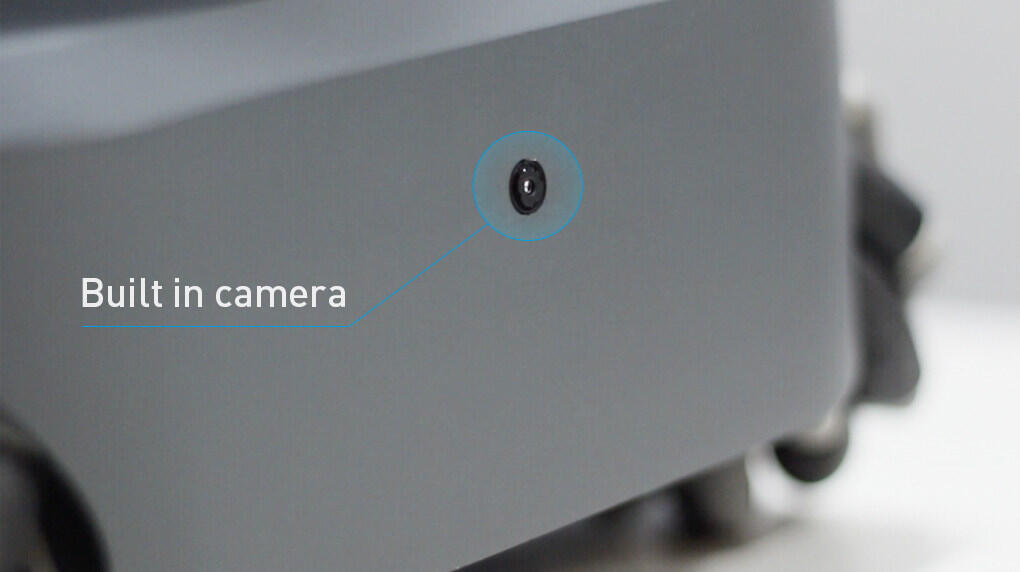
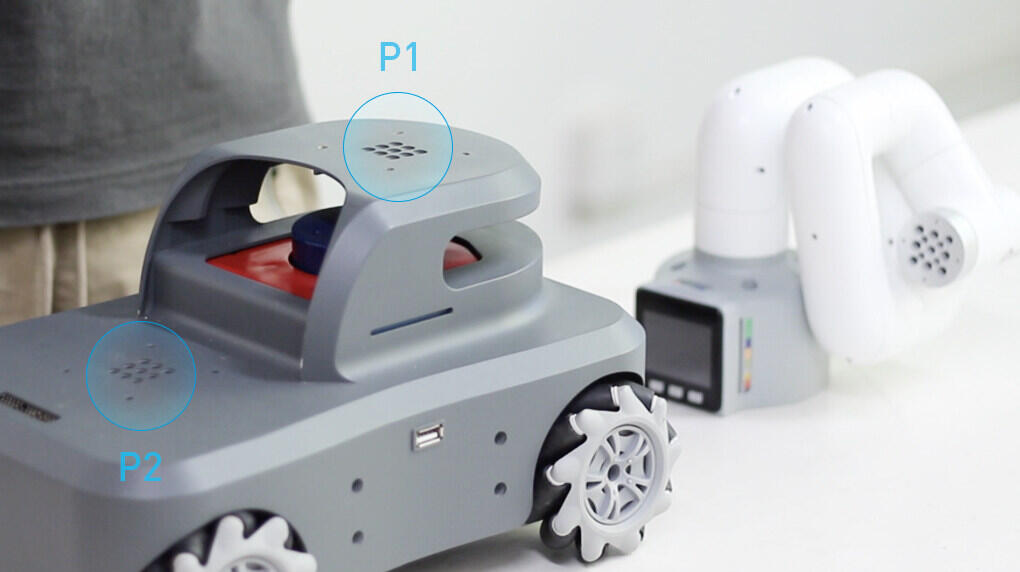
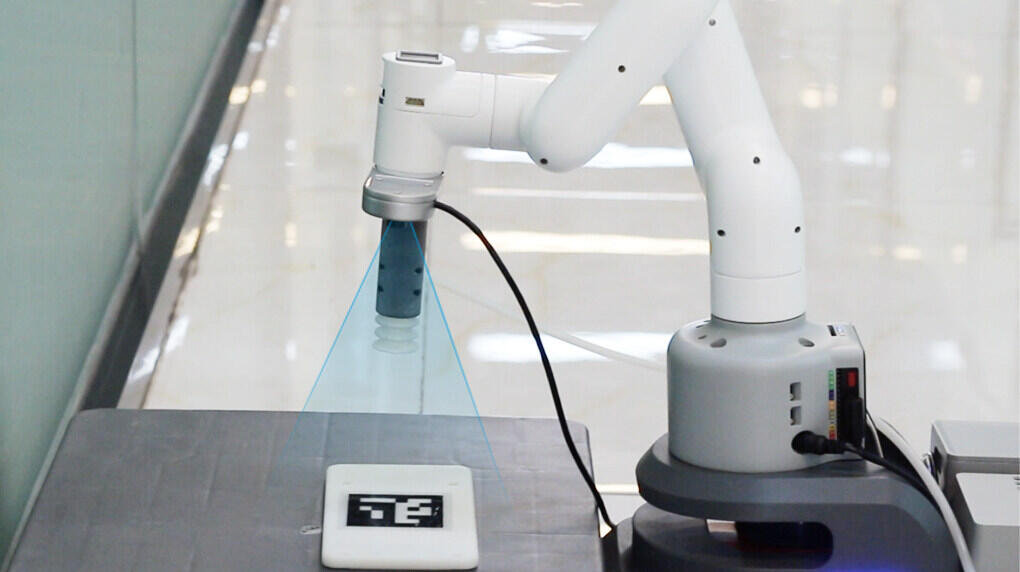
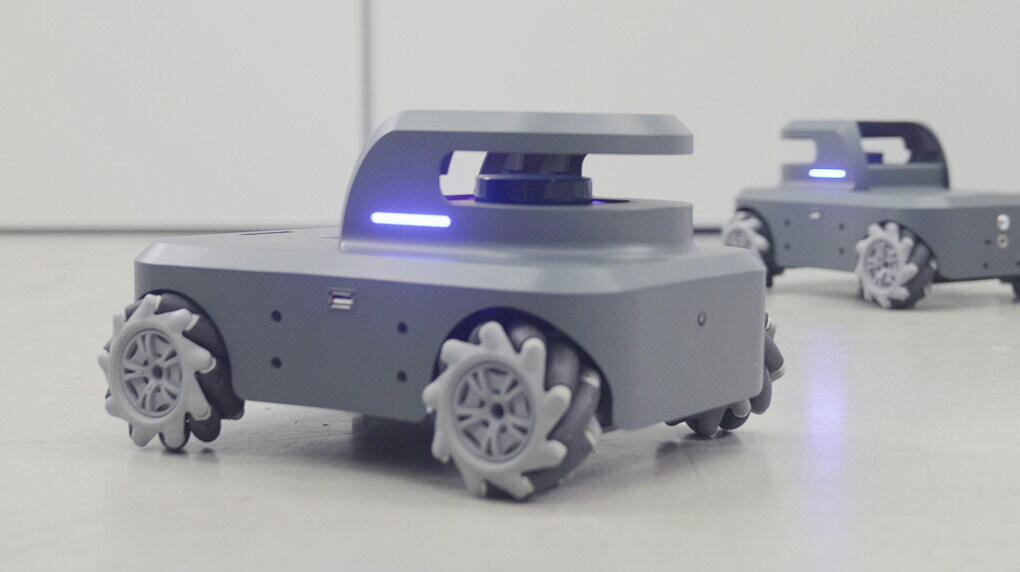
myAGV 应用场景 产品特征 技术参数 资料下载 麦克纳姆轮 激光雷达 高精度摄像头 myAGV是大象机器人与华蔚联合开发,全自主生产,机械臂沿用了myCobot,加载了摄像头 eye_in_hand设计。myAGV采用了麦克纳姆轮+激光雷达+高精度摄像头。控制方式:可自主导航、手柄控制、键盘控制等。 应用场景 Slam激光雷达简图和导航 Eye-in-Hand 识别与抓取,使用不同末端执行器 多种玩法 六自由度复合机器人 全向轮小车 四个麦克纳姆轮,全包裹设计 SLAM激光雷达导航与建图 进行实时运动与建图;可自主导航 内置摄像头 可进行物体识别与精确定位 最小复合机器人 可搭载多达2台myCobot机械臂,并搭载周边执行器 手眼标定 myCobot可进行摄像头精确定位与标定,并进行大范围内抓取 多种玩法 可多机协同,多种控制方式,多台机器人实时运动 丰富的教学系统 支持ROS仿真、moveIt全部开源;同时接口丰富:树莓派、arduino、python、C++ 技术参数 基本参数 基本参数 产品型号myAGV 尺寸300x205x145mm 重量3.02kg 轮胎类型麦克纳姆轮 电机类型霍尔编码器电机 电机最大转速220RPM/min 小车移动速度0.9m/s 激光雷达360°全向雷达 识别范围8m 内置控制器树莓派4b 充电电压25.2V 1A 内置摄像头500W像素 卓越客户代表 大象机器人将持续为创新赋能,携手世界各地优秀企业共创美好新生活! 上一页 下一页 合作高校 资料下载 myAGV使用手册 myAGV 详细使用指导手册 点击阅读 myAGV产品画册 产品特点相关介绍 立即下载