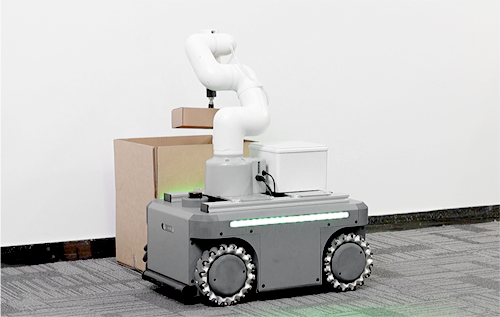
myAGV Pro 使用手册 前往淘宝 前往京东 产品功能 myAGV Pro全向转向系统小车,负载50kg,最大运动速度1.5m/s,硬件上选配移动底盘全向轮/蜂窝自主动轮、2D/3D激光雷 达、2D/3D视觉相机、自动回充模块等一系列配置,软件系统上完美适配 ROS2 的长期稳定Humble版本、支持2D 或 3D 的 SLAM 定位导航算法Gmapping、 Cartographer、RTABMAP 等,同时也可以完成多目标环境检测、语音语义识别等人工智 能的相关应用,作为复合机器人底盘选项,适配320、630、750、A1等机械臂,是智能机器人领域方面进行仓储搬运、教学 学习、创新应用、科研研究和参加举行竞技比赛的理想平台。 驱动 全向移动系统 速度 1.5m/s 负载 50kg 电池 24V 20mAh 磷酸铁锂 建图导航 支持 2/3DSLAM,NAV2 模块化设计 电池快拆更换 ROS2 适配ROS2 Humble 仿真 支持RVIZ、Gezebo仿真 模块化设计 支持灵活定制 硬件采用高度模块化架构,支持核心功能组件按需选配。运动底盘可选配麦轮或全向轮方案;感知系统支持2D/3D激光雷达自由搭配; 视觉系统兼容2D/3D相机扩展;功能模块集成自动回充功能。 多场景智控复合机器人 myAGV Pro可搭载多种机械臂,提供构建具身智能训练与固定场景自动化作业一体化解决方案。 物流分拣训练场 myCobot320+吸泵机械臂构建快递分拣环 境,支持抓取-装载动作的强化学习数据采 集与策略验证。 家居服务仿真环境 myArm M750机械臂模拟脏衣物收纳任务,提供 触觉反馈与视觉识别的多模态训练数据集。 智能办公交互实验 myCobot Pro630机械臂+力控夹爪+视觉系统复现 CMU开门任务,支持基于物理交互的模仿学习算法 调优。 标准开发方式支持 全系配置提供标准化通信接口与开发协议,无缝对接主流硬件平台及Ubuntu22.04+ROS2 Humble开发环境。基于Ubuntu22.04 LTS,提供长期支持与安全更新,保障系统稳定运行,提供RVIZ、Gazebo仿真环境支持。 集成ROS2 Humble 框架,支持Gmapping、Cartographer及Rtabmap主流3D SLAM算法,实现高精度建图与导航定位,满足复杂环境下的自主移动 需求。提供丰富的 python API接口与示例代码,快速响应仓储物流、安防巡检等多场景定制需求。支持标准RS232串口协议— 可外接各类微控制器,自定义系统及导航方案,实现跨平台无缝集成;极简部署流程,内置可视化UI界面一键启动,兼容无线手 柄即插即用控制,降低操作门槛。 安全高效 智能续航 安全可靠的磷酸铁锂电池 热稳定性优异,循环寿命长,适应多 种作业环境。 便捷的快拆式电池更换 快速更换备用电池,减少停机时间, 提升作业连续性。 智能自动回充功能 低电量自动返回充电,简化运维流程, 保障作业不间断。 技术参数 参数类别 详细信息 产品尺寸530*360*245mm自重40KG最大载重50KG运动模式全向系统转向通讯接口RS232速度(满载测试)1.5m/s最小转弯半径0m(原地自转)最大爬坡角度10°电池24V 20AH 磷酸铁锂续航(空载 1m/s)5-6小时充电时长5-6小时悬挂形式摇摆臂独⽴悬挂适用场地室内防护等级IP22工作温度-10-40℃对外接口DC4017充电口XT60 24V5A供电口*1XT30 12V5A供电口*1USB-C串口*1网口*1HDMI*1INPUT IO*6OUTPUT*6USB3.0*2